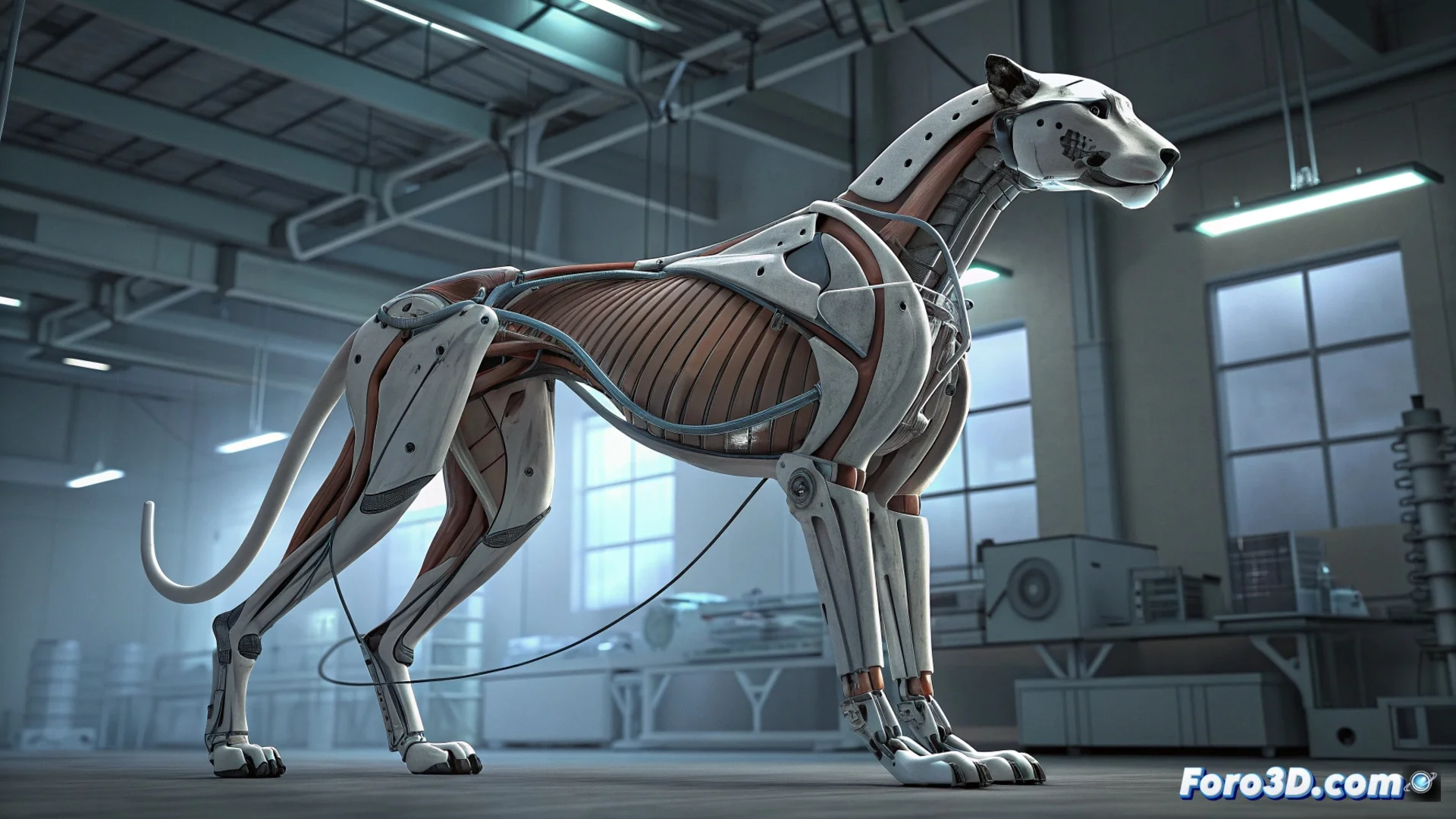
Pneupard:一款模仿猎豹的气动四足机器人
在大阪大学,一个科研团队开发了一款名为Pneupard的四足机器人,其推进系统完全基于压缩空气。该项目旨在复制猎豹——陆地上最快的动物——肌肉的力学特性。通过用气动执行器取代电动机,该机器人获得了自然柔性,使其能够动态移动并适应地形。🐆
气动系统定义了其移动性和柔性
气动系统是Pneupard能力的核心。由加压空气驱动的执行器膨胀和收缩,以模拟真实的肌肉收缩。这产生了一种不仅潜在快速,而且平滑且具有固有弹性的运动方式。这些组件的顺应性或适应性使机器人能够更安全地与环境互动,因为它可以缓冲冲击并在移动时调节力量。这种方法为设计需要在不平坦或多变地形上操作的机器人提供了有前景的替代方案。
气动系统的关键优势:- 提供模仿生物组织的内在柔性。
- 允许快速运动和自然的冲击吸收。
- 便于与不可预测环境进行更安全的互动。
自然运动的优雅需要不仅仅模仿形态;它需要复制肌肉的物理特性。
一个用于理解动物如何移动的物理实验室
Pneupard的主要目的不是商业化,而是作为先进的研究工具。研究人员将其用作有形的物理模型,来测试关于动物如何协调四肢并保持平衡的理论。通过分析其步态模式的数据,可以更好地理解自然界中的能量效率、稳定性和运动节奏。
该研究潜在应用:- 改进用于救援或探索的步行机器人设计。
- 启发开发更自然和适应性的机器人假肢。
- 创建基于生物运动的新的物理康复系统。
从模仿到匹敌的道路
尽管其灵感来源于迅捷的猎豹,但Pneupard当前的时速更像悠闲的散步而非赛跑。这一细节突显了一个基本原则:仿效生物系统的复杂性和效率是一项复杂的工程挑战。Pneupard不是最终目的地,而是连接生物学和机器人学的关键一步,证明有时最优雅的解决方案可能由简单的压缩空气驱动。🤖