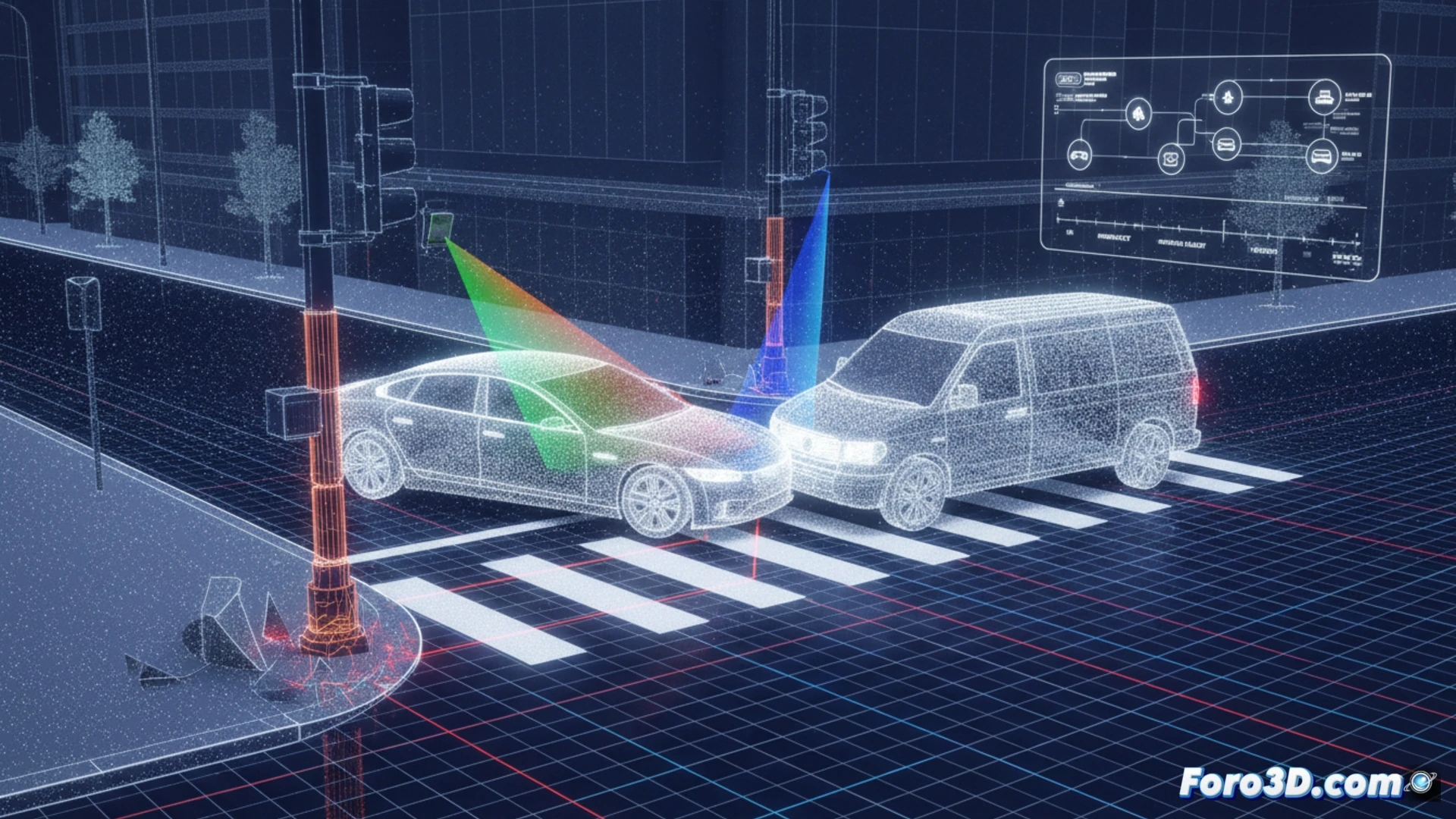
في الشهر الماضي، كان تقاطع ذكي مزود بأجهزة استشعار ليدار (LiDAR) للبنية التحتية V2X مسرحًا لحادث بين مركبتين ذاتيتي القيادة. السلطات، التي حيرها الفشل الظاهري لنظام التحكم، لجأت إلى خط أنابيب الطب الشرعي ثلاثي الأبعاد لتوضيح الوقائع. الفرضية الرئيسية كانت تشير إلى خطأ في المعايرة ناتج عن التمدد الحراري لعمود التثبيت، وهو عطل يصعب اكتشافه في الوقت الفعلي ولكنه بالغ الأهمية لسلامة هذه البيئات.
سير العمل التقني: من سحابة النقاط إلى المحاكاة في UE5 🛠️
بدأت العملية باستخراج سحب النقاط الخام المسجلة بواسطة ليدار التقاطع خلال الثواني التي سبقت الاصطدام. كانت الخطوة الأولى الحاسمة هي استيراد هذه البيانات إلى CloudCompare، حيث تم إجراء محاذاة دقيقة (تسجيل ICP) لسحب النقاط الثابتة (الأعمدة، الحواجز) مقابل النموذج CAD للأعمال المدنية. كشفت هذه المقارنة عن إزاحة تدريجية للسحابة بمقدار 4.2 سنتيمترات على المحور Z، بالتزامن مع ذروة درجة الحرارة المحيطة. بعد تأكيد خطأ المعايرة، تم تصدير المسار المصحح للمركبات إلى MATLAB لحساب حركيات الاصطدام. أخيرًا، تم دمج البيانات النظيفة وشبكات المركبات في Unreal Engine 5، حيث أعيد إنشاء المشهد بإضاءة HDR وفيزياء واقعية لتصور نقطة التصادم الدقيقة والمناورة المراوغة الفاشلة.
دروس للتحقق من صحة البنية التحتية ليدار 📐
تؤكد هذه الحالة على الحاجة إلى تنفيذ إجراءات معايرة ديناميكية في أجهزة استشعار V2X. يمكن لتمدد العمود، وهو ظاهرة فيزيائية يمكن التنبؤ بها، أن يحرف إدراك المركبة ذاتية القيادة دون أن تكتشفه الأنظمة الموجودة على متنها. إن الجمع بين أدوات مثل CloudCompare للتحليل الهندسي وUnreal Engine 5 للمحاكاة البصرية يعزز نفسه كمعيار واقعي في تحقيقات حوادث التنقل المتصل. لا يتعلق الأمر فقط بإعادة بناء حادث، بل بفهم كيف تتفاعل البيئة المادية والبنية التحتية الرقمية للفشل أو لإنقاذ الأرواح.
هل من الممكن اكتشاف خطأ معايرة ليدار في تقاطع V2X من خلال تحليل أنماط انعكاس الأجسام الثابتة قبل وقوع حادث مثل الموصوف؟
(ملاحظة: في تحليل المشاهد، كل شاهد مقياس هو بطل صغير مجهول.)