يمثل Aiper Scuba S1 Pro قفزة في مجال الروبوتات المنزلية الخدمية، حيث يلغي الاعتماد على الخراطيم والتوصيلات الكهربائية الخارجية. يدمج روبوت تنظيف حمامات السباحة اللاسلكي هذا نظام ملاحة خاصًا يُسمى WavePath 2.0، مما يسمح له بتنظيف شامل لحوض السباحة. استقلاليته في الطاقة وقدرته على تسلق الجدران ومعالجة خط الماء تجعله دراسة حالة مثالية لتحليل كيفية حل الأتمتة ثلاثية الأبعاد لمشاكل الصيانة المعقدة.
هندسة المستشعرات وخوارزمية WavePath 2.0 🤖
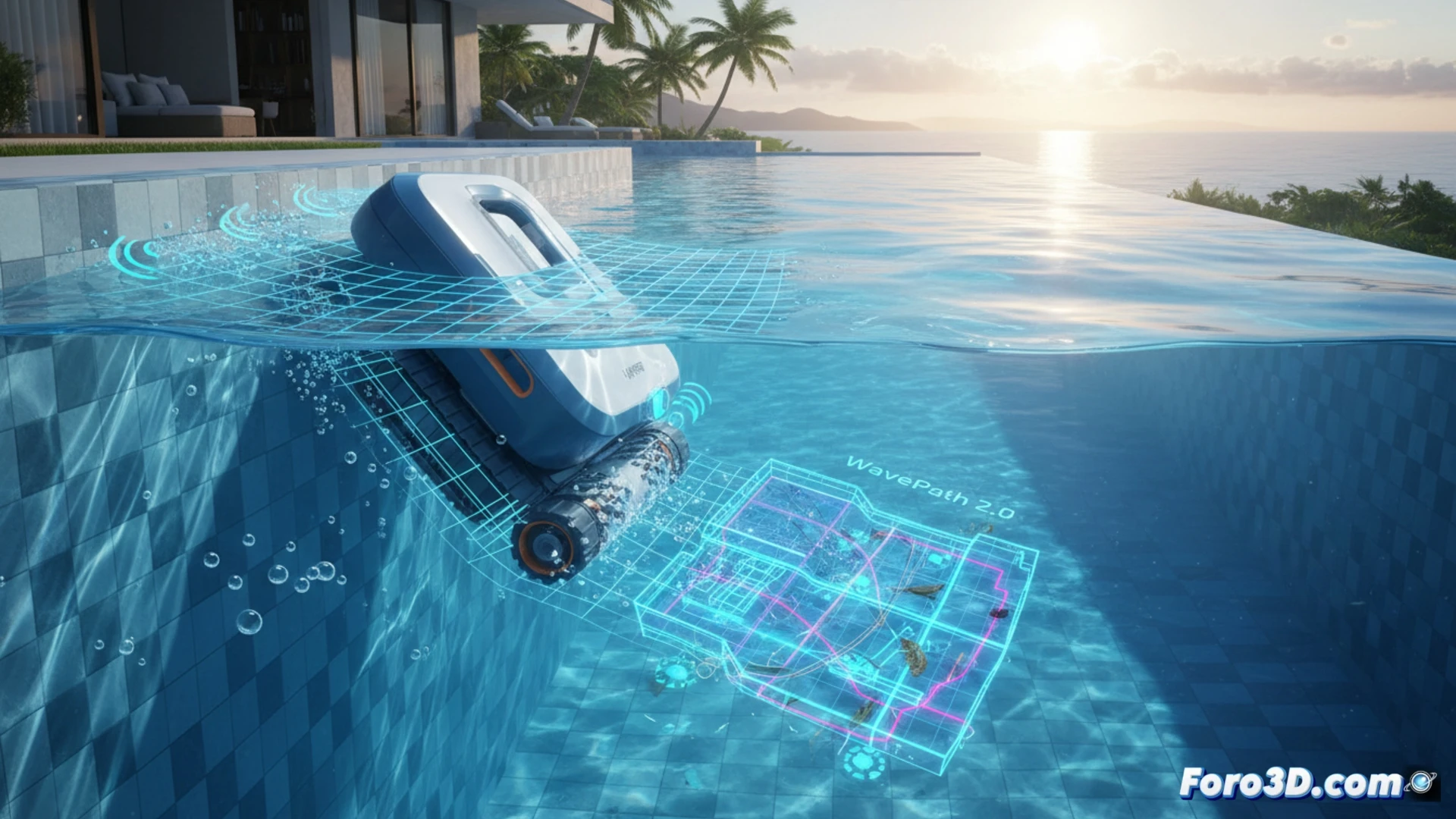
يكمن مفتاح أداء Scuba S1 Pro في خوارزمية المسح الحجمي الخاصة به. على عكس الروبوتات التي تعتمد على مستشعرات التلامس أو الجيروسكوبات البسيطة، يستخدم نظام WavePath 2.0 مزيجًا من مقاييس التسارع ثلاثية المحاور ومستشعرات الضغط التفاضلي لبناء خريطة ثلاثية الأبعاد للبيئة. لا يقتصر الروبوت على الارتداد العشوائي؛ بل يحسب مسارات حلزونية ومتوازية لتغطية القاع والجدران وخط الماء. عندما يكتشف تغيرًا في الزاوية عبر مستشعر الميل، يقوم بتشغيل محركات الجر لتسلق الجدار العمودي، مستخدمًا الشفط الناتج عن مضخة الدفع المزدوج للالتصاق بالسطح. بمجرد وصوله إلى خط الماء، يقلل السرعة ويمد فرشاته الجانبية لكشط الحطام المتراكم، مما يضمن تغطية 100% من المحيط دون تداخلات غير ضرورية.
الأتمتة ثلاثية الأبعاد مقابل الأنظمة التقليدية 🏊
بالمقارنة مع روبوتات حمامات السباحة السلكية أو النماذج العشوائية، يُظهر S1 Pro كفاءة فائقة في الطاقة والوقت. غالبًا ما تفقد الأنظمة التقليدية الوقت في تنظيف المناطق المغطاة بالفعل أو تعلق في عوائق مثل السلالم. الأتمتة ثلاثية الأبعاد لـ Scuba S1 Pro، من خلال مسح الحجم الكامل للمياه، تعمل على تحسين مسار العودة إلى محطة الشحن وتعطي الأولوية للمناطق ذات التراكم الأعلى للأوساخ. هذا لا يقلل وقت دورة التنظيف بنسبة 30% تقديرية فحسب، بل يقلل أيضًا من التآكل الميكانيكي بتجنب الاصطدامات المستمرة. يُظهر هذا الروبوت أن الابتكار الحقيقي في الروبوتات المنزلية لا يكمن فقط في قوة الشفط، بل في الذكاء للتحرك بكفاءة في بيئة ثلاثية الأبعاد معقدة مثل حمام السباحة.
كيف يحل تطبيق خوارزميات الملاحة الذاتية في روبوت حمام سباحة مثل Aiper Scuba S1 Pro التحديات الرئيسية لكفاءة الطاقة والتغطية الكاملة في البيئات المائية غير المنظمة؟
(ملاحظة: محاكاة الروبوتات ممتعة، حتى يقرروا عدم اتباع أوامرك.)