وقع حادث في تقاطع ذكي عندما كانت إشارة المرور V2X تشير إلى الطريق مفتوح، لكن المركبة ذاتية القيادة لم تتفاعل في الوقت المناسب. لتوضيح الخلل، تم بناء توأم رقمي دقيق للتقاطع. أعاد هذا النموذج إنتاج البيئة الحقيقية باستخدام بيانات LIDAR من الشارع، مما سمح للمهندسين بعزل المتغير الحرج: زمن الاستجابة بين اكتشاف المستشعر واستجابة المركبة. كان الهدف هو إيجاد الفارق الزمني الذي حوّل الضوء الأخضر إلى فخ مميت.
استيراد سحب LIDAR ومحاكاة زمن الاستجابة في Unity 🚦
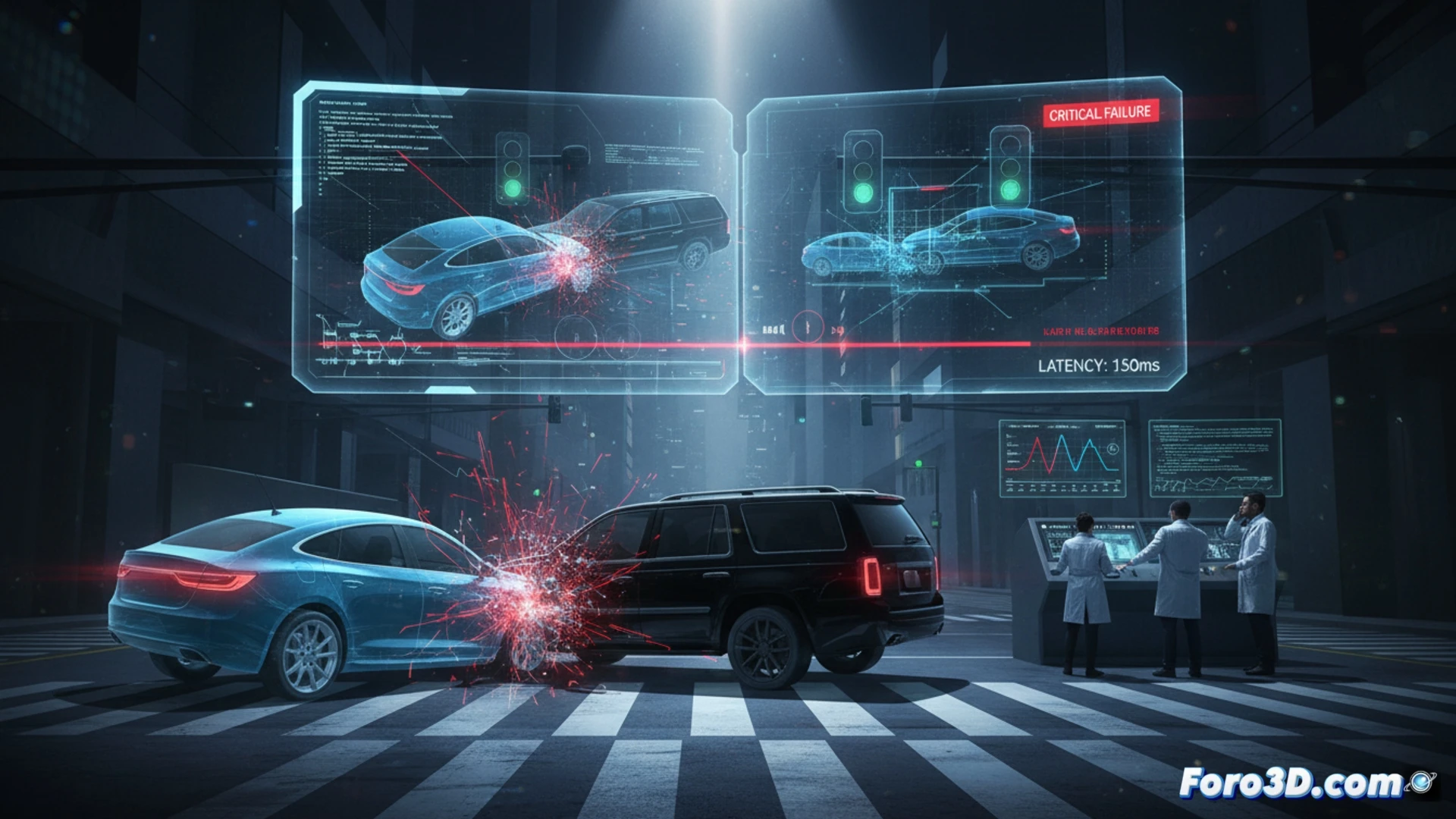
بدأت العملية بالتقاط هندسة الطريق باستخدام مستشعر LIDAR ثابت في الشارع. تمت معالجة البيانات الخام في CloudCompare لتنظيف الضوضاء ومحاذاة سحب النقاط مع النموذج CAD للتقاطع. تم استيراد هذه الشبكة المحسّنة إلى Unity، حيث تم إنشاء التوأم الرقمي. لإعادة إنتاج الحادث، تمت برمجة سكريبت يحاكي زمن استجابة شبكة V2X. في Unreal Engine 5، تم تصور التسلسل الدقيق: اكتشف مستشعر LIDAR أحد المشاة وأرسل الإشارة، لكن المركبة ذاتية القيادة تلقت أمر الفرملة بتأخير قدره 120 مللي ثانية، وهو ما يكفي للتسبب في الاصطدام. حلل MATLAB إشارات الوقت للتوأم، مقارنةً الطابع الزمني لـ LIDAR مع الطابع الزمني لوحدة التحكم الإلكترونية (ECU) للمركبة، مؤكداً الفارق الزمني الحرج.
دروس لبنى تحتية ذكية أكثر أماناً 🛠️
أثبت التوأم الرقمي أن الخلل لم يكن في المستشعر ولا في المركبة، بل في بروتوكول المزامنة V2X. كان زمن الاستجابة البالغ 120 مللي ثانية، رغم صغره، مميتاً في بيئة عالية السرعة. الحل ليس فقط في أجهزة أسرع، بل في تنفيذ مخزن أمان زمني في برنامج إشارة المرور، تم التحقق منه من خلال المحاكاة في التوائم الرقمية. تؤكد هذه الحالة أن موثوقية المدينة الذكية تعتمد على المزامنة المثالية بين توائمها الافتراضية وأنظمتها المادية.
كمهندس، ما هو زمن الاستجابة المحدد بالمللي ثانية بين إشارة المرور V2X وسحابة التوأم الرقمي الذي تسبب في الفارق الزمني المميت في رد فعل المركبة ذاتية القيادة؟
(ملاحظة: توأمي الرقمي موجود الآن في اجتماع، بينما أنا هنا أقوم بالنمذجة. لذا تقنياً، أنا في مكانين في نفس الوقت.)