أدى العطل الأخير في روبوت جراحي أثناء عملية عن بُعد إلى إطلاق أجراس الإنذار في قطاع الأتمتة. الحادثة، حيث نفذ المشرط حركة غير منتظمة قاتلة، نشأت من الذراع الآلي. كشف تحليل جنائي باستخدام القياس البصري أن السبب لم يكن خطأ برمجيًا، بل تآكلًا دقيقًا غير متماثل في المحركات المؤازرة والتروس، ناتجًا عن زمن انتقال في إشارة التحكم.
القياس الدقيق: المسح وتحليل الإجهاد 🔬
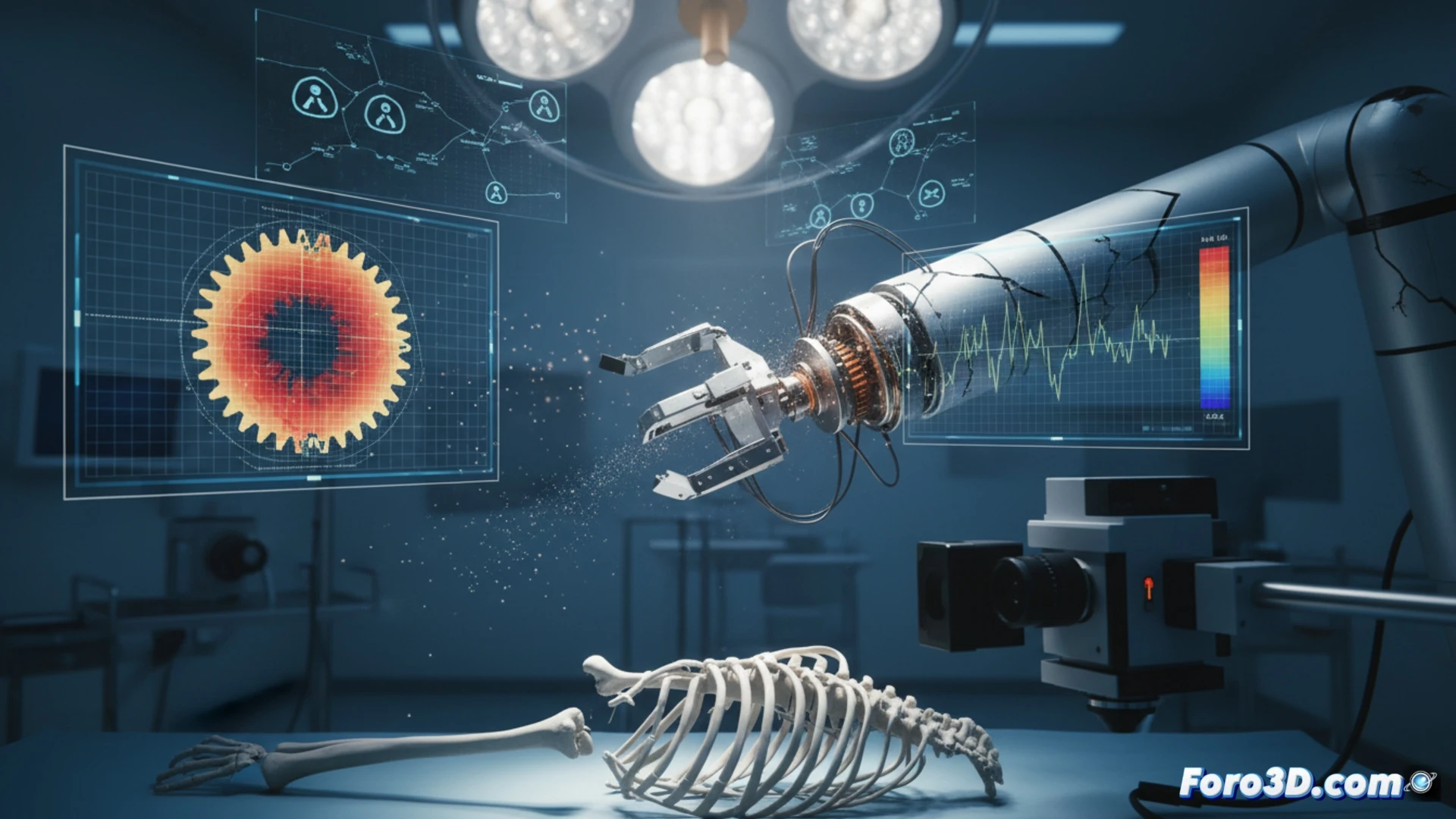
لتحديد السبب الجذري، تم استخدام الماسح الضوئي GOM ATOS Q لالتقاط هندسة المحركات المؤازرة والتروس في الروبوت. اكتشف برنامج القياس انحرافات بمقدار ميكرونات قليلة فقط على أسطح التلامس، وهو تآكل غير متماثل لا يمكن رؤيته بالعين المجردة. ارتبط نمط التآكل هذا بالاهتزازات الدقيقة المستمرة المسجلة في MATLAB أثناء العملية. تسبب زمن انتقال إشارة التحكم، رغم كونه غير محسوس للجراح، في تذبذب المحركات المؤازرة والإفراط في التصحيح، مما أدى إلى إجهاد دوري في أسنان التروس المصنوعة من السبائك. أكدت النماذج في SolidWorks أن الإجهاد المتراكم تجاوز حد إجهاد المادة، مما تسبب في فقدان الدقة المليمترية.
دروس للتوائم الرقمية والتحكم التنبؤي ⚙️
تثبت هذه الحالة أن الروبوتات الجراحية لا تعتمد فقط على دقة البرمجيات، بل على السلامة الميكانيكية على المستوى الميكرومتري. الحل المقترح يتمثل في تنفيذ توائم رقمية في Blender وSolidWorks تحاكي التآكل في الوقت الفعلي، مدعومة ببيانات زمن الانتقال. يمكن لنظام الصيانة التنبؤية، القائم على تحليل أطياف الاهتزاز من MATLAB، اكتشاف هذه التذبذبات قبل أن تؤدي إلى تآكل حرج. لم يكن العطل في الأجهزة، بل في تصميم تحكم تجاهل الإجهاد الميكانيكي الناتج عن الشبكة.
كيف يمكن لصناعة الروبوتات الجراحية تخفيف خطر التآكل الدقيق في المحركات الناتج عن زمن انتقال الإشارة في عمليات الجراحة عن بُعد لمسافات طويلة؟
(ملاحظة: محاكاة الروبوتات ممتعة، حتى يقرروا عدم اتباع أوامرك.)