الحادثة الأخيرة للتآكل في ذراع جراحي آلي تعيد فتح النقاش حول إجهاد المواد في بيئات عالية الدقة. على عكس الروبوتات الصناعية، حيث يمكن أن يؤدي العطل إلى إيقاف خط الإنتاج، في الجراحة المساعدة، يهدد التآكل سلامة المريض بشكل مباشر. يحلل هذا المقال التقني أسباب التدهور الميكانيكي، واستخدام التوائم الرقمية لمحاكاة الإجهاد الدوري، واستراتيجيات الصيانة التنبؤية القائمة على النماذج ثلاثية الأبعاد.
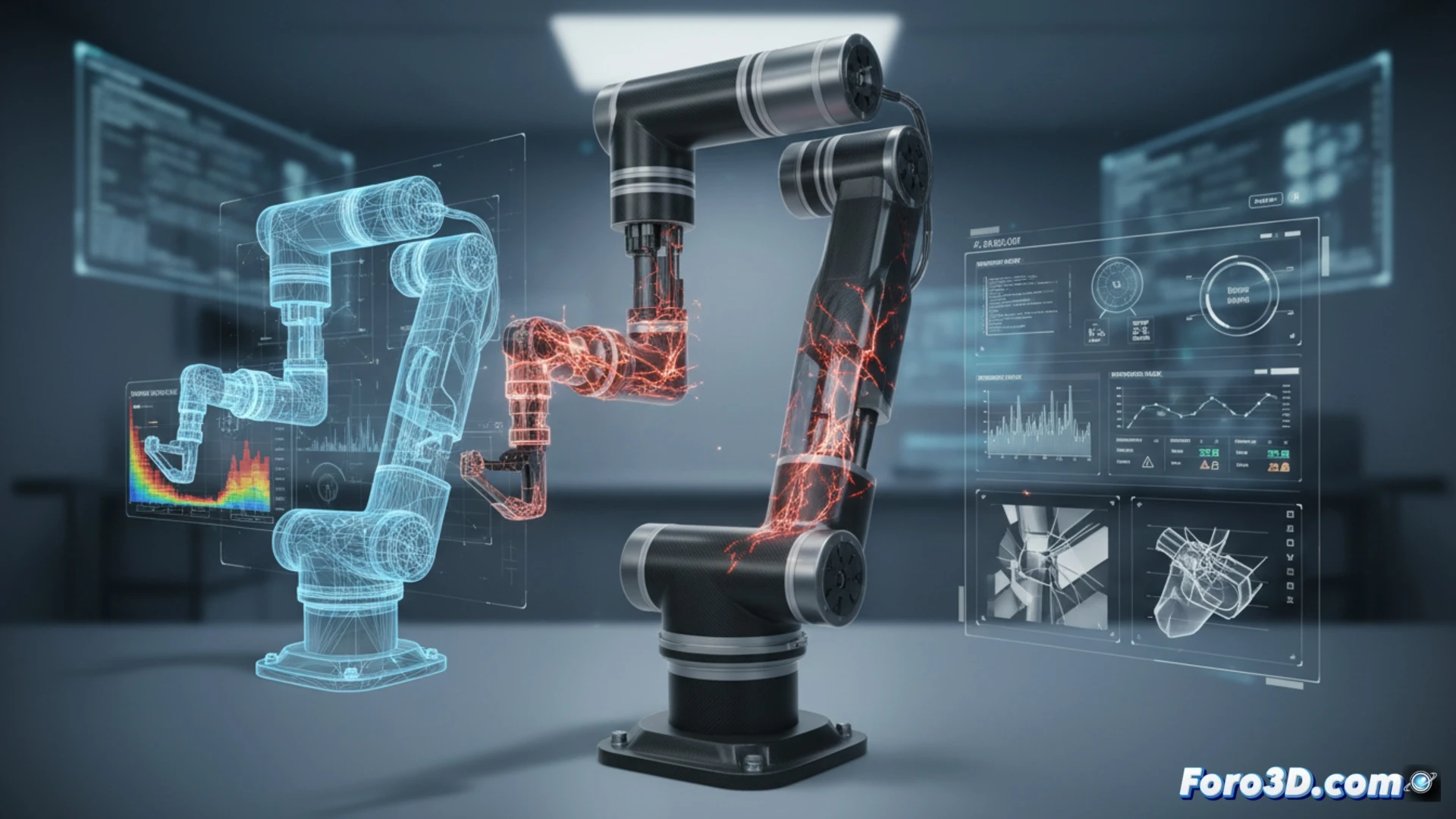
محاكاة نقاط الإجهاد الحرجة باستخدام التوائم الرقمية 🔧
عادةً ما يتركز التآكل في ذراع جراحي آلي في مفاصل الكرة والمخفضات التوافقية، حيث يولد عزم الدوران المتكرر شقوقًا دقيقة. من خلال محاكاة العناصر المحدودة المدمجة في التوائم الرقمية، يمكن للمهندسين تصور توزيع الإجهادات في الوقت الفعلي. على سبيل المثال، يسمح نموذج ثلاثي الأبعاد لذراع دافنشي بتحديد أن المرفق يتحمل حمولة تزيد بنسبة 40% عن التقديرات في التصاميم الأولية. تتيح هذه التقنية، المدمجة مع أجهزة استشعار الاهتزاز، التنبؤ بالأعطال قبل أسابيع، مع ضبط دورات التشحيم أو استبدال المكونات الحرجة قبل أي تدخل فعلي.
الآثار المترتبة على السلامة ومعضلة الصيانة التفاعلية ⚠️
الدرس الرئيسي من هذه الحادثة هو أن الروبوتات الطبية لا يمكنها تحمل نهج تفاعلي. يمكن أن يترجم كل تآكل دقيق غير مكتشف إلى انحراف ملليمتري أثناء الخياطة. لا يؤدي استخدام المحاكاة ثلاثية الأبعاد إلى تحسين تكاليف الصيانة فحسب، بل يعيد تعريف بروتوكولات الاعتماد. يجب أن يكون اشتراط أن يكون لكل ذراع جراحي توأم رقمي محدث ببيانات الإجهاد معيارًا، وليس خيارًا. التكنولوجيا اللازمة للتنبؤ بالعطل موجودة؛ التحدي هو تنفيذها قبل أن يتحول التآكل إلى خطر يمكن تجنبه.
بالنظر إلى الحادثة الأخيرة للتآكل في ذراع جراحي آلي، ما هي منهجيات المحاكاة التنبؤية أو أجهزة استشعار المراقبة في الوقت الفعلي التي يمكن تنفيذها لتوقع الإجهاد الميكانيكي في المفاصل قبل أن يهدد سلامة المريض؟
(ملاحظة: محاكاة الروبوتات ممتعة، حتى يقرروا عدم اتباع أوامرك.)