كشف التخريب في روبوت ربط محركات عن ثغرة تقنية نادرة: تغيير عزم الربط من خلال انزياح إلكتروني في محول رأس الأداة. تم تحليل هذا الحادث، الذي أثر على خط التجميع، باستخدام أدوات ثلاثية الأبعاد مثل GOM Inspect وBlender لإعادة بناء تسلسل العطل وتحديد مصدر التلاعب.
إعادة بناء الطب الشرعي ثلاثي الأبعاد للتخريب في رأس أداة الربط 🔧
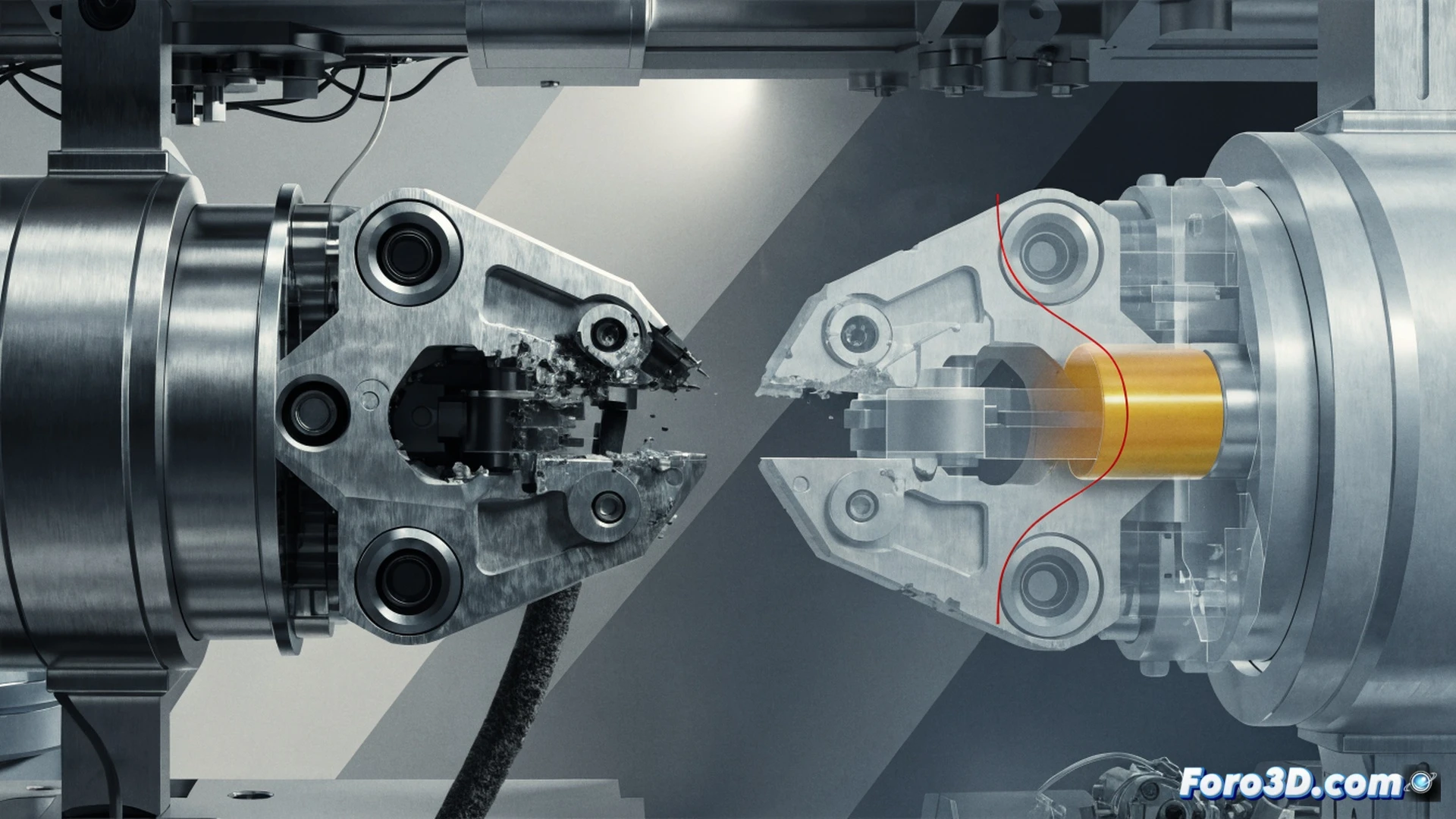
سمح التحليل باستخدام GOM Inspect بمسح رأس الأداة واكتشاف انحرافات في هندسة المحول، بينما استُخدم Blender لمحاكاة مسار الروبوت واللحظة الدقيقة للانزياح. تم تحديد أن إشارة إلكترونية مزيفة كانت تغير العزم الفعلي المطبق، مما أدى إلى ربط غير كافٍ أو مفرط. هذه الطريقة، التي يصعب اكتشافها في الفحوصات البصرية، تطلبت تقاطع بيانات بين سجل العزم والشبكات ثلاثية الأبعاد لتأكيد الشذوذ.
أداة الربط المتمردة: عندما يقرر روبوت الربط بطريقته الخاصة 🤖
أغرب ما في القضية هو أن الروبوت، بعيدًا عن كونه مخربًا محترفًا، كان فقط يطيع الأوامر. قال له أحدهم: اربط فضفاضًا هنا وقويًا هناك، والآلية المسكينة، دون رأي خاص بها، نفذت ذلك حرفيًا. الآن، يفحص الفنيون كل محول كما لو كان جاسوسًا، وينتظر الروبوت دوره في غرفة الاستجواب، على الرغم من أن اعترافه الوحيد سيكون صوت تنبيه خطأ.