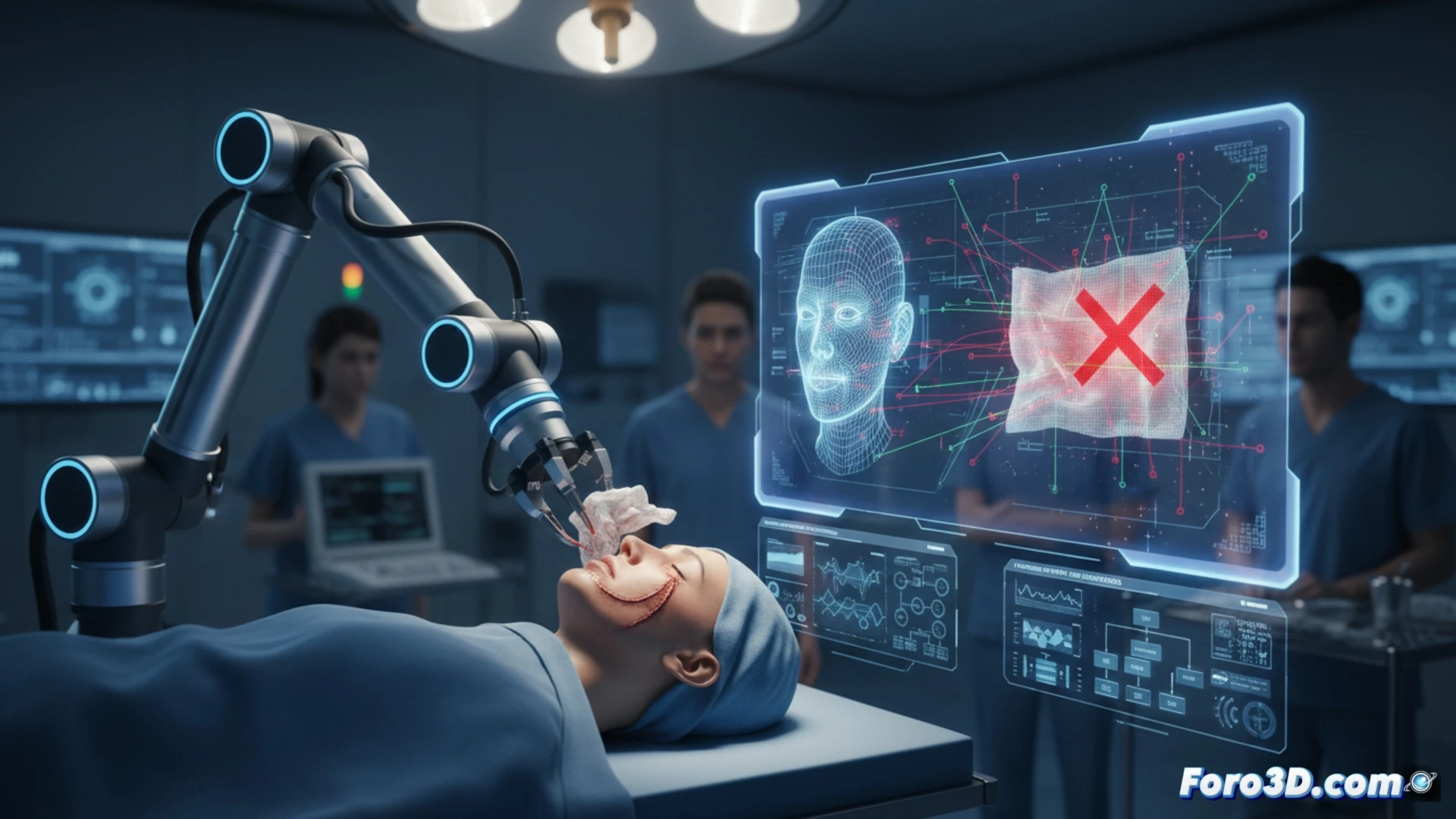
Коллаборативный робот, предназначенный для помощи в дерматологических процедурах, выполнил нежелательный глубокий разрез на пациенте. Криминалистический анализ инцидента с помощью 3D-реконструкции данных датчиков силы и картирования облака точек пациента выявил критическую аномалию: кобот спутал хирургическую марлю с поверхностью кожи. Этот случай подчеркивает риски тактильного восприятия в медицинской среде.
Реконструкция ошибки: Цифровой двойник и облака точек 🛠️
С использованием RoboGuide для кинематического моделирования и Unreal Engine 5 для цифрового двойника был воссоздан хирургический сценарий. Интеграция данных с датчиков крутящего момента в цифровой двойник позволила визуализировать отклонение от запланированной траектории. Анализ в CloudCompare облака точек после инцидента показал разрыв на поверхности пациента. Алгоритмическое сравнение выявило, что механический импеданс марли, сохраненный в базе данных робота как мягкая ткань, вызвал ложное показание контакта, что спровоцировало маневр разрезания.
3D-симуляция как щит от сенсорных сбоев 🛡️
Этот инцидент демонстрирует, что 3D-симуляция — это не просто инструмент проектирования, а критически важный аудитор безопасности. Интеграция данных облаков точек в реальном времени в цифровой двойник позволила выявить путаницу между материалами (марля против эпидермиса). Для хирургической автоматизации проблема заключается не только в точности руки, но и в способности алгоритма восприятия различать нежесткие объекты. Урок ясен: мы должны научить коботов сомневаться в своих тактильных ощущениях.
Как индустрия коботов может интегрировать системы избыточной тактильной обратной связи, чтобы избежать тактильных сбоев, ставящих под угрозу безопасность в точных медицинских приложениях, таких как косметическая хирургия?
(P.S.: Симулировать роботов весело, пока они не решат не следовать вашим командам.)