Автономный робот для управления багажом сбил пассажира в терминале аэропорта в часы интенсивного солнечного освещения. Судебно-техническая экспертиза была сосредоточена на реконструкции поля зрения стереоскопической системы камер робота, чтобы определить, не создало ли отражение солнца от полированного пола зону ошибки глубины. Этот случай представляет собой веху в применении 3D-технологий для анализа аварий с участием автономных систем, где визуальное восприятие дало сбой из-за экстремальных условий окружающей среды.
Криминалистический рабочий процесс: фотограмметрия, LiDAR и симуляция в Unreal Engine 5 🛠️
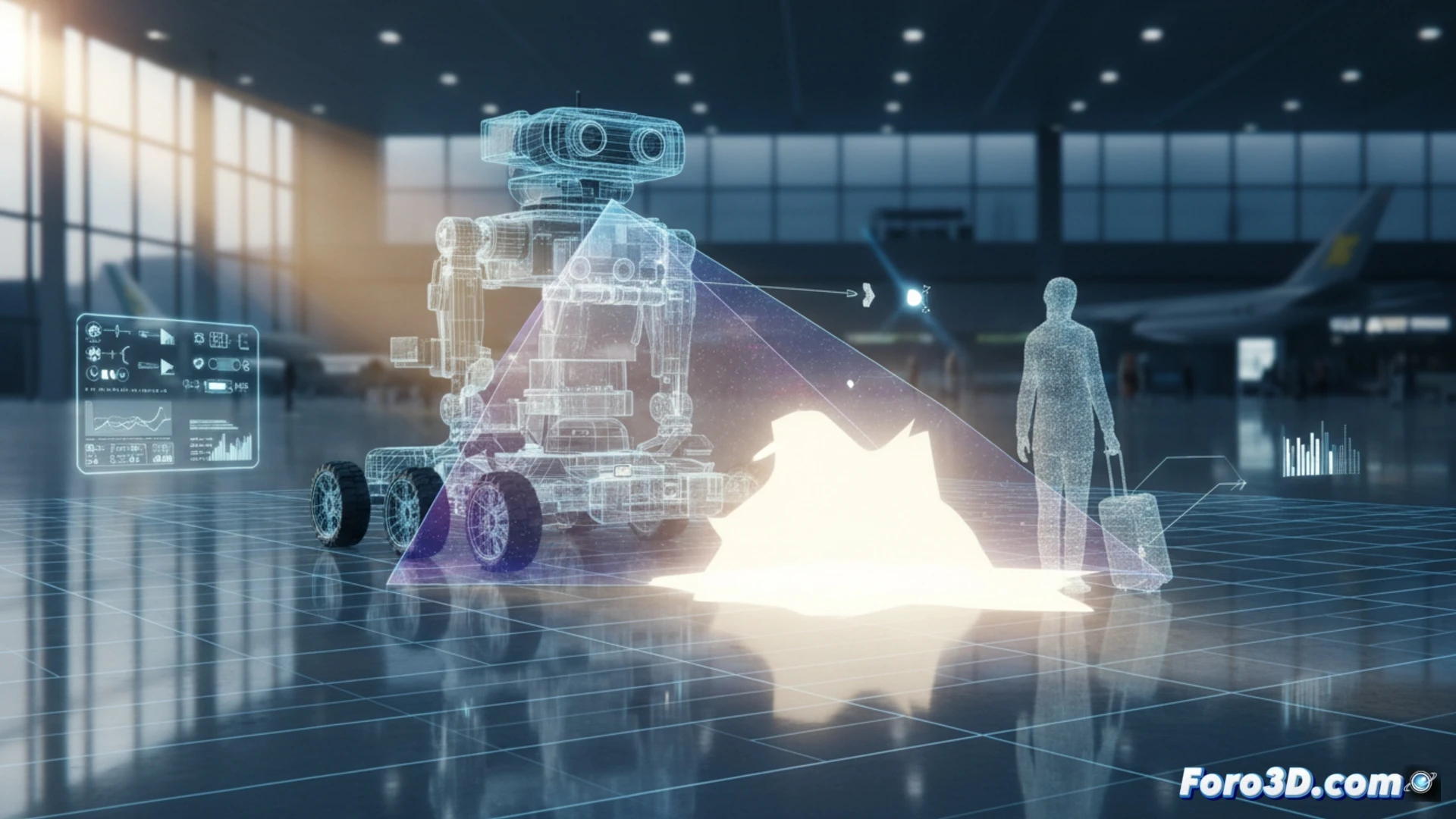
Процесс начался со сбора данных о месте происшествия с помощью LiDAR-сканирования и фотограмметрии в RealityCapture, что позволило создать высокоплотное облако точек пола и зоны удара. В CloudCompare данные об окружающей среде были совмещены с CAD-моделью робота для воссоздания точного положения его датчиков в момент инцидента. Затем в Unreal Engine 5 было смоделировано стереоскопическое поле зрения с нанесением на пол отражающего материала и настройкой реального солнечного освещения. Симуляция подтвердила, что отражение создавало градиент яркости, насыщающий пиксели в определенной области, что приводило к обнулению бинокулярной диспаратности и образованию оптической мертвой зоны диаметром 40 см как раз в том месте, где находился пассажир.
Уроки для проектирования датчиков в автономной робототехнике 🤖
Данная экспертиза демонстрирует, что системы стереоскопического зрения, хотя и надежны в контролируемых условиях, уязвимы для зеркальных поверхностей и экстремальных изменений освещения. Примененная методология, сочетающая фотограмметрию, выравнивание облаков точек и симуляцию датчиков, устанавливает воспроизводимый криминалистический конвейер для будущих инцидентов с автономными роботами. Подтверждение гипотезы об отражении солнечного света вынуждает производителей внедрять сенсорную избыточность, такую как времяпролетный LiDAR, для смягчения этих оптических мертвых зон в аэропортовой среде.
Как может судебно-медицинская 3D-реконструкция выявить влияние визуальной окклюзии из-за теней, отбрасываемых на траекторию движения автономного робота во время аварии в аэропорту?
(PS: В криминалистическом конвейере самое главное — не смешивать улики с эталонными моделями... иначе получишь призрака на месте происшествия.)