Судебная биомеханика эволюционировала в сторону количественного анализа локомоции человека. Когда подозреваемый попадает в объектив камеры видеонаблюдения, его походка становится уникальной физической подписью. В этой статье подробно описывается технический конвейер для извлечения, моделирования и 3D-симуляции траектории и жестов субъекта на основе видеозаписей низкого разрешения или сканов места преступления.
Конвейер захвата и биомеханического моделирования 🦿
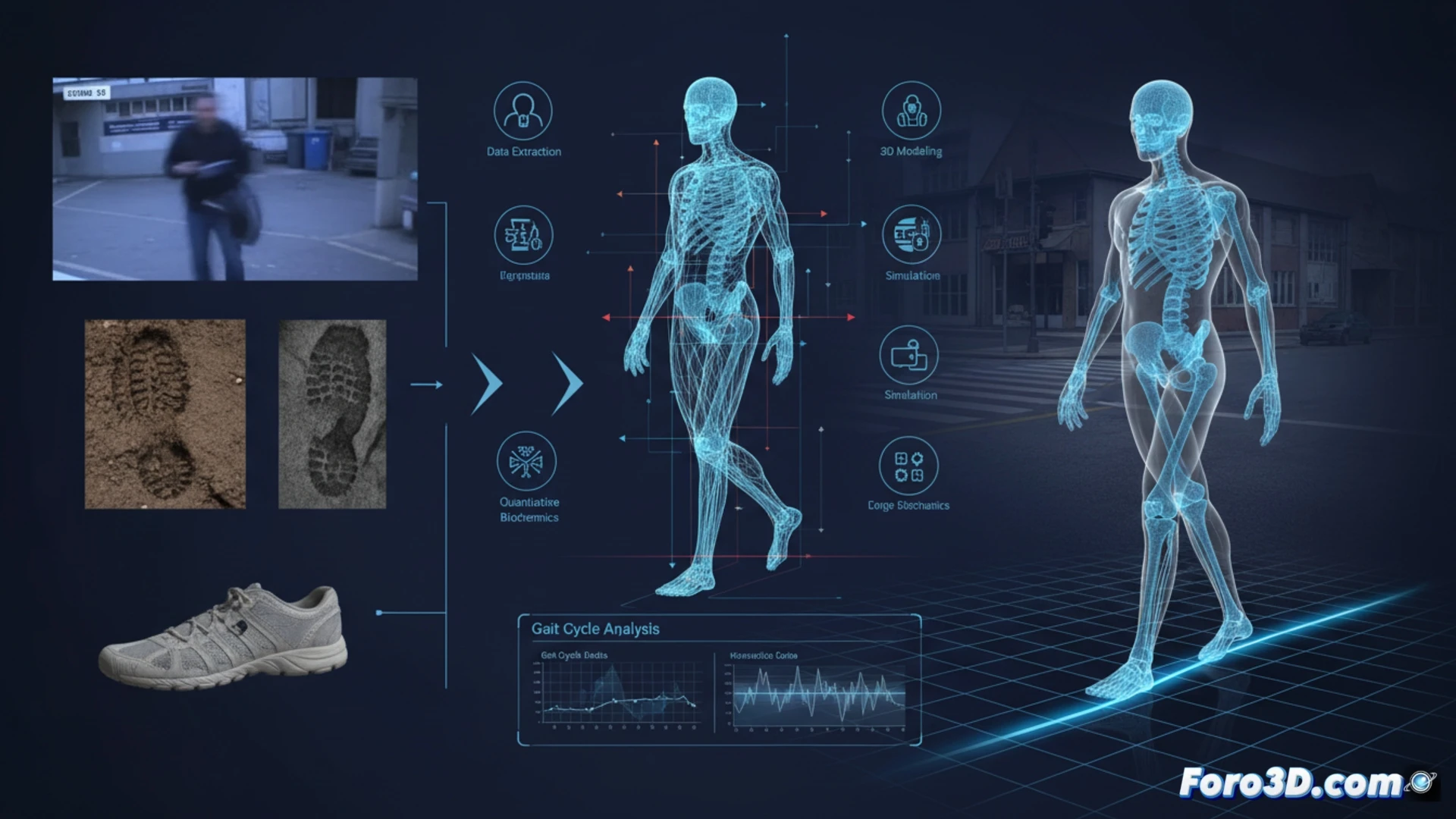
Процесс начинается с калибровки камеры видеонаблюдения с помощью обратной фотограмметрии, используя известные ориентиры на сцене для устранения искажений объектива. Затем применяется алгоритм оптического отслеживания (OptiTrack или решение камеры в Blender) для извлечения 3D-координат суставов подозреваемого (бедро, колено, лодыжка). Эти данные импортируются в Maya или Unreal Engine для создания скелетного рига. Обратная кинематика позволяет рассчитать угловую скорость и длину шага — критические данные для определения того, бежал ли подозреваемый, шел или остановился в определенной точке. Наконец, модель накладывается на исходное видео для проверки временного совпадения.
Правовые последствия и технические погрешности ⚖️
Хотя 3D-симуляция дает убедительное визуальное представление, эксперт должен документировать погрешность. Разрешение исходного видео, частичное перекрытие тела и освещение могут создавать артефакты в походке. В реальном случае ошибка в интерполяции бедра привела к обвинению человека в симулированной хромоте. Прозрачность судебного конвейера требует публикации параметров сглаживания и количества использованных кадров, чтобы анимация не превратилась в аргумент визуального авторитета без статистической основы.
Как можно проверить точность 3D-реконструкции походки, когда единственным доступным доказательством является видеозапись низкого разрешения с одного ракурса камеры безопасности.
(PS: не забудьте откалибровать лазерный сканер перед документированием сцены... иначе вы можете моделировать призрака)