Два Straddle Carrier столкнулись в автономном портовом терминале — инцидент, который казался механической неисправностью, пока 3D-реконструкция объединенных журналов датчиков (LiDAR и Radar) не указала на более тонкую причину. Моделирование в Gazebo и Unreal Engine 5 позволило инженерам воссоздать точный момент удара, выявив, что цифровой двойник зоны маневрирования показывал неверное положение одной из машин. Расхождение возникло из-за критической задержки в сети 5G, которая рассинхронизировала данные в реальном времени.
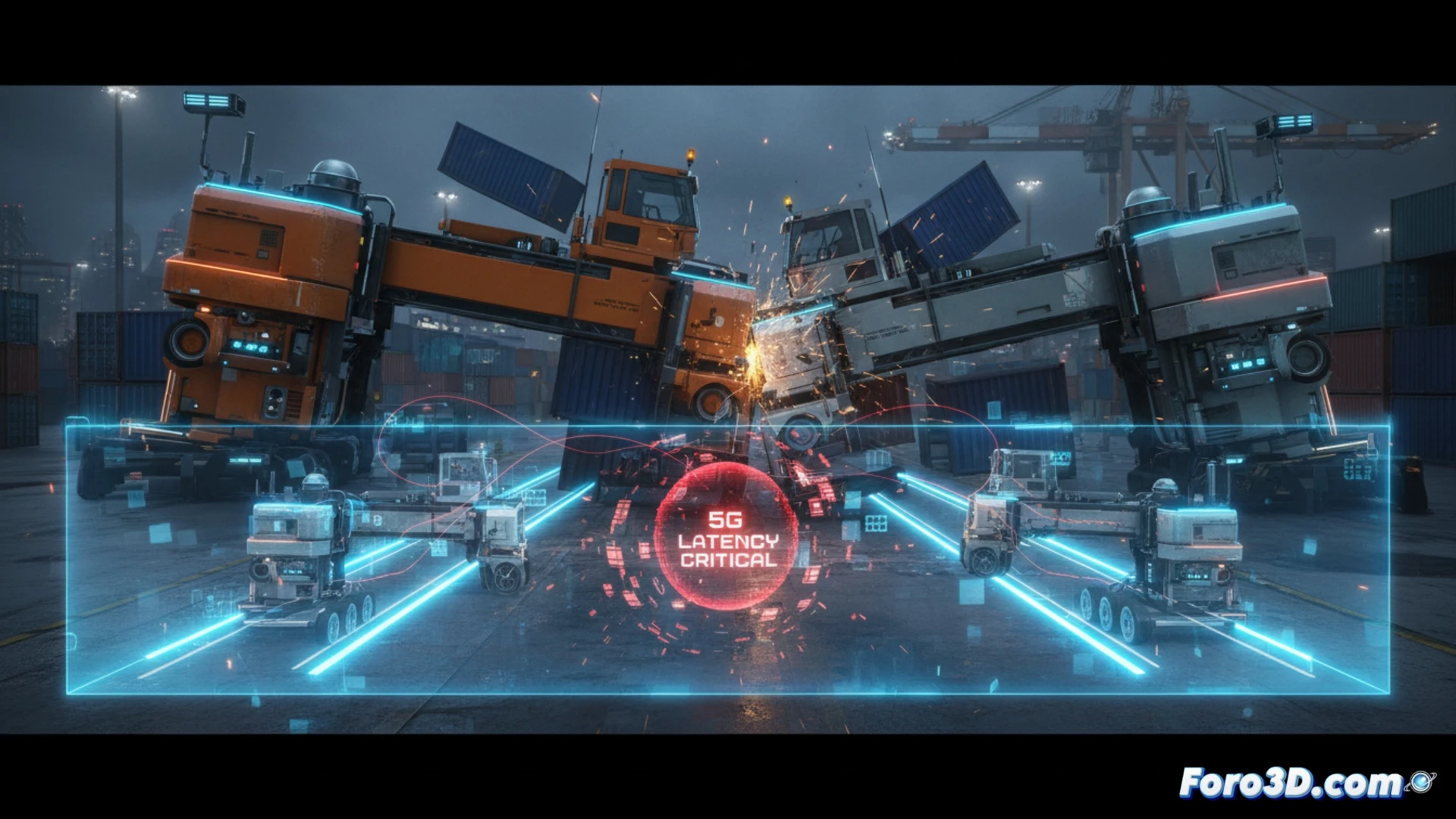
Криминалистическая реконструкция с помощью Gazebo и Unreal Engine 5 🛠️
Процесс расследования начался с извлечения необработанных данных из систем LiDAR и Radar, установленных на каждом портальном кране. Эти данные были импортированы в Gazebo для первого кинематического моделирования, где было замечено, что зарегистрированные траектории не совпадают с планом маршрута. Впоследствии объединенное облако точек было загружено в Unreal Engine 5 с использованием плагина Leica Cyclone для управления высокой плотностью точек. Визуализация в цифровом двойнике показала, что одно из транспортных средств отображалось в виртуальном местоположении, отличном от его реального положения в момент столкновения. Задержка сети 5G, измеряемая в микросекундах, привела к тому, что система управления получила устаревшее обновление положения, что привело к ошибочной команде движения.
Синхронизация данных как основа безопасности автономных систем ⏱️
Этот инцидент подчеркивает, что надежность цифрового двойника зависит не только от точности 3D-модели, но и от временной синхронизации потоков данных. Слияние датчиков LiDAR и Radar оказалось жизненно важным для обнаружения аномалии, но сеть 5G стала узким местом. Для предотвращения будущих столкновений предлагается внедрить систему временных меток (timestamping) на уровне аппаратного обеспечения каждого датчика и буфер компенсации задержки в цифровом двойнике. Урок ясен: в автономной логистике скорость моделирования должна соответствовать скорости физического мира.
Как показывает инцидент в автономном портовом терминале, где задержка 5G привела к столкновению двух Straddle Carrier, несмотря на прогностический цифровой двойник, какой порог максимальной задержки в миллисекундах вы считаете критическим для того, чтобы промышленный цифровой двойник в 3D-логистике мог предотвращать столкновения между порталами в реальном времени, и какие решения вы предлагаете для измерения и смягчения этого параметра?
(P.S.: Моделирование промышленного завода похоже на игру в Sims, только без бассейнов, чтобы убрать лестницу)