Во время хирургической операции с использованием системы DaVinci Next роботизированная рука выполнила незапланированное движение, поставив под угрозу безопасность процедуры. Инцидент инициировал углубленный судебно-медицинский анализ, объединивший симуляцию в RoboGuide, изучение цифрового двойника робота и проверку микро-сервоприводов с помощью 3D-микроскопии Keyence VHX, выявив зарождающиеся неисправности, не обнаруживаемые стандартным диагностическим программным обеспечением.
Реконструкция незапланированного движения с помощью RoboGuide и MATLAB 🤖
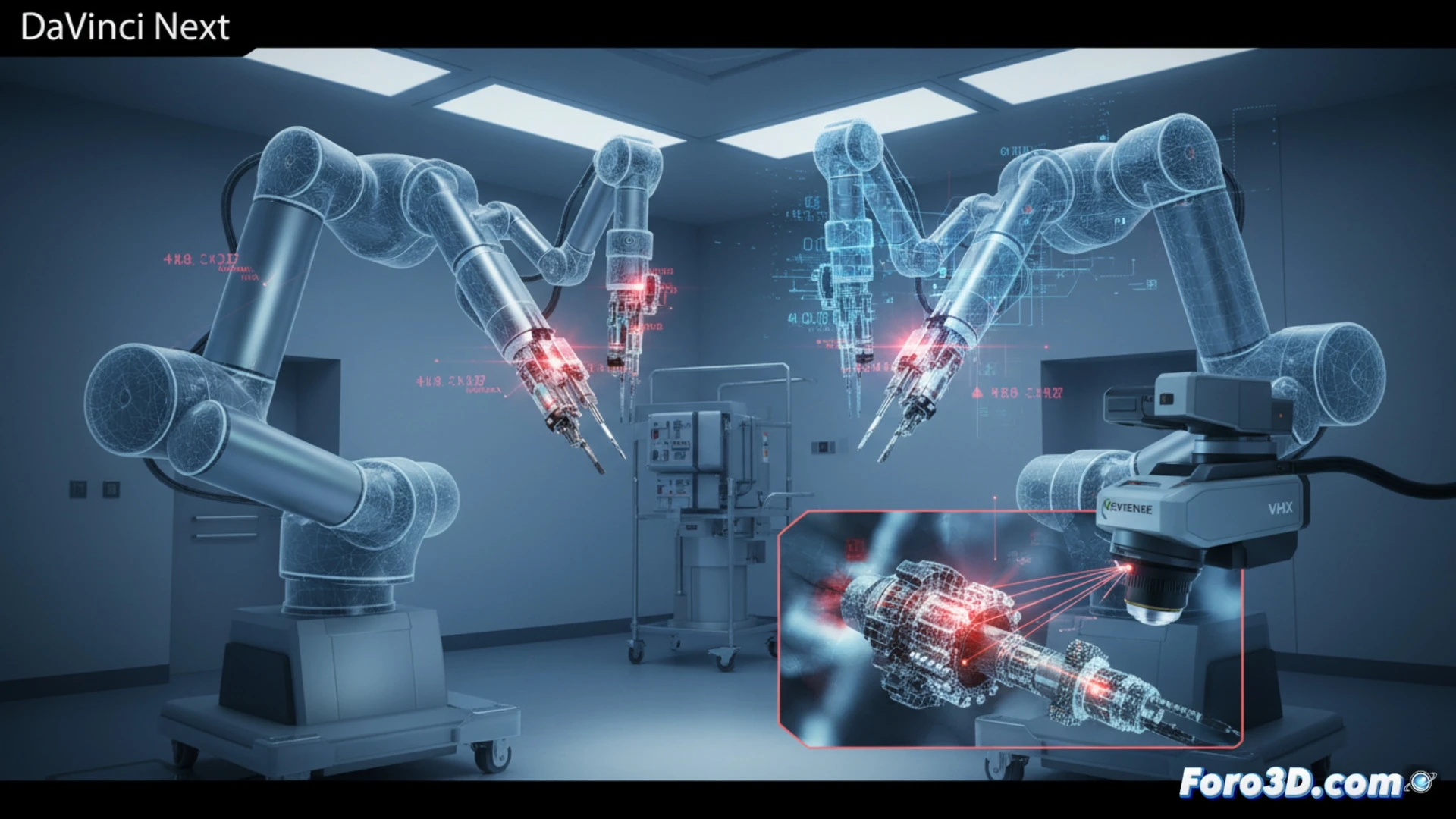
Инженерная команда загрузила журналы телеметрии робота в MATLAB для определения точной последовательности команд и отклонений. Был обнаружен аномальный скачок тока в микро-сервоприводе руки №3. Для визуализации кинематики отказа модель цифрового двойника была импортирована в RoboGuide, воссоздав нежелательную траекторию. Симуляция подтвердила, что угловое отклонение совпадало с микротрещиной в планетарной передаче сервопривода, видимой только под 3D-микроскопом Keyence VHX при 500-кратном увеличении, где были очевидны следы усталостного износа материала.
Уроки для предиктивного обслуживания в медицинской автоматизации 🔬
Этот случай демонстрирует, что надежность в хирургической робототехнике не может зависеть только от функциональных тестов. Интеграция цифровых двойников с симуляцией в RoboGuide и 3D-микроскопическим анализом позволяет создавать модели предиктивного износа. Коррелируя журналы MATLAB с изображениями Keyence, можно установить пороги вибрации или тока, предвещающие катастрофические отказы. Для отрасли это означает принятие гибридного подхода к физической и цифровой проверке, повышая стандарты безопасности в автоматизации.
Можно ли предсказать отказ роботизированной руки DaVinci Next во время операции путем интеграции в реальном времени цифрового двойника с данными микроскопии механического износа? 🏥
(P.S.: Симулировать роботов весело, пока они не решат не следовать вашим командам.)