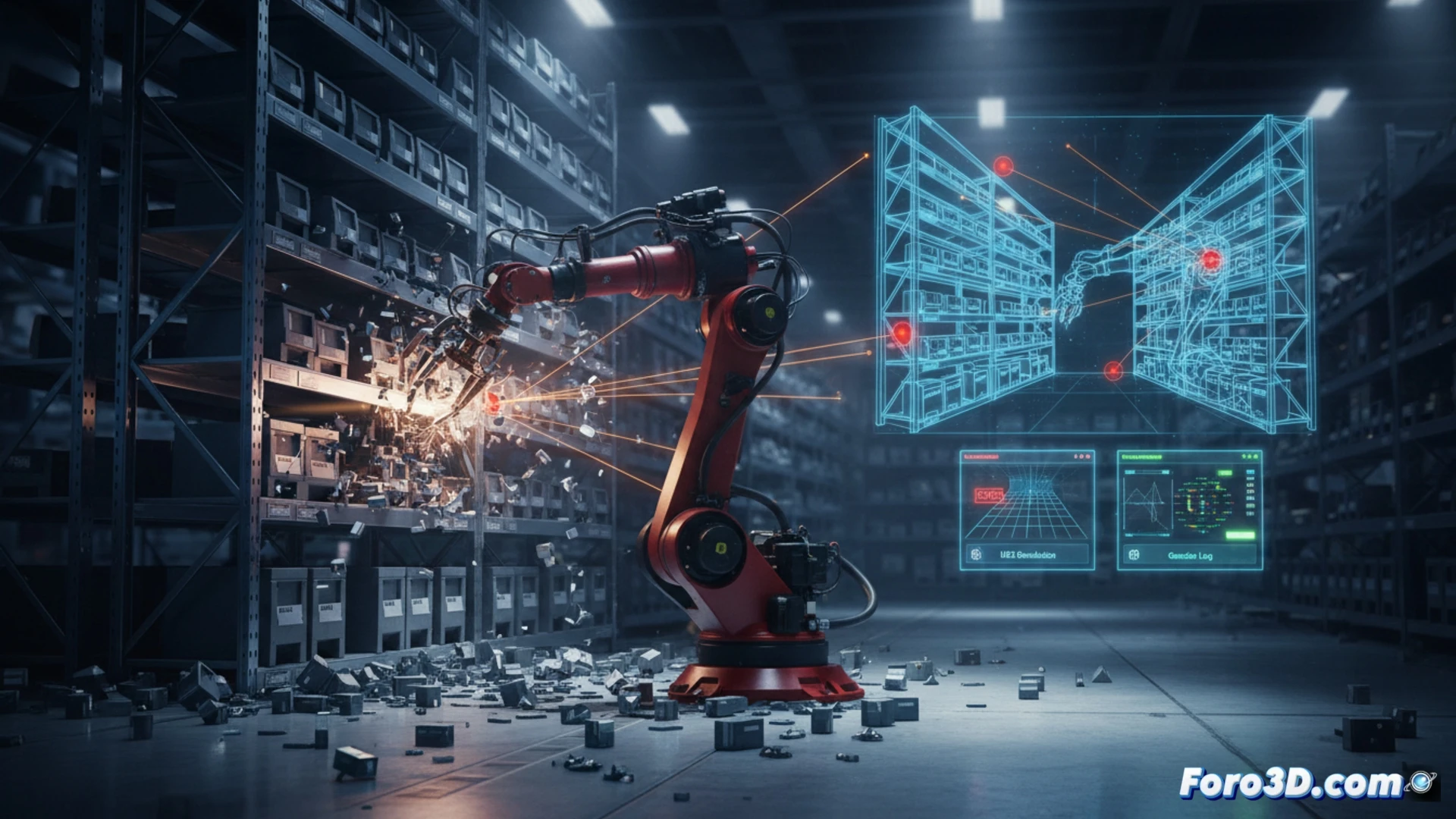
Робот-сборщик столкнулся со стеллажом на складе высокой плотности хранения, вызвав эффект домино, который повалил несколько рядов груза. Аварию можно было бы предотвратить, если бы лидары правильно обнаружили близость препятствия. Чтобы понять причину сбоя, аварию воссоздали с помощью цифрового двойника, сопоставив реальные данные, отсканированные с помощью FARO Scene, с симуляциями в Gazebo и визуализациями в Unreal Engine 5. Целью было выявить слепые зоны, образованные зеркальными отражениями от металлических поверхностей прохода.
Криминалистическая реконструкция с FARO Scene и валидация в Gazebo 🛠️
Первым шагом был захват геометрии склада после аварии с помощью FARO Scene, что позволило создать высокоточное облако точек. Это облако было импортировано в Navisworks для анализа последовательности структурного обрушения. Впоследствии был построен цифровой двойник робота и стеллажей в Gazebo с воспроизведением исходных траекторий сборки. При моделировании траектории лидара в этой виртуальной среде были выявлены зоны, где лазерный луч падал под скользящими углами на полированные стальные панели, создавая отражения, которые датчик интерпретировал как свободное пространство. Прямое сравнение реального облака точек и симуляции подтвердило, что эти слепые зоны точно совпадают с местом удара.
Переосмысление безопасности: от физической планировки к иммерсивной симуляции 🚧
Авария показывает, что полагаться исключительно на лидары без валидации виртуальной среды может быть опасно. Зеркальное отражение от металлов является критической слепой зоной на складах высокой плотности хранения. В качестве улучшения предлагается перепроектировать планировку, добавив рассеивающие метки на углы стеллажей и переместив крепления лидара для охвата проблемных углов. Unreal Engine 5 позволяет визуализировать эти изменения в реальном времени, предоставляя инженерам по безопасности иммерсивный инструмент для тестирования конфигураций до их физической реализации, тем самым снижая риск новых эффектов домино.
Какие параметры цифрового двойника в Unreal Engine 5 не смогли предсказать столкновение робота-сборщика и как можно было бы избежать эффекта домино на складе высокой плотности хранения?
(P.S.: в Foro3D мы оптимизируем маршруты так же, как оптимизируем полигоны: пока компьютер не скажет «хватит»)