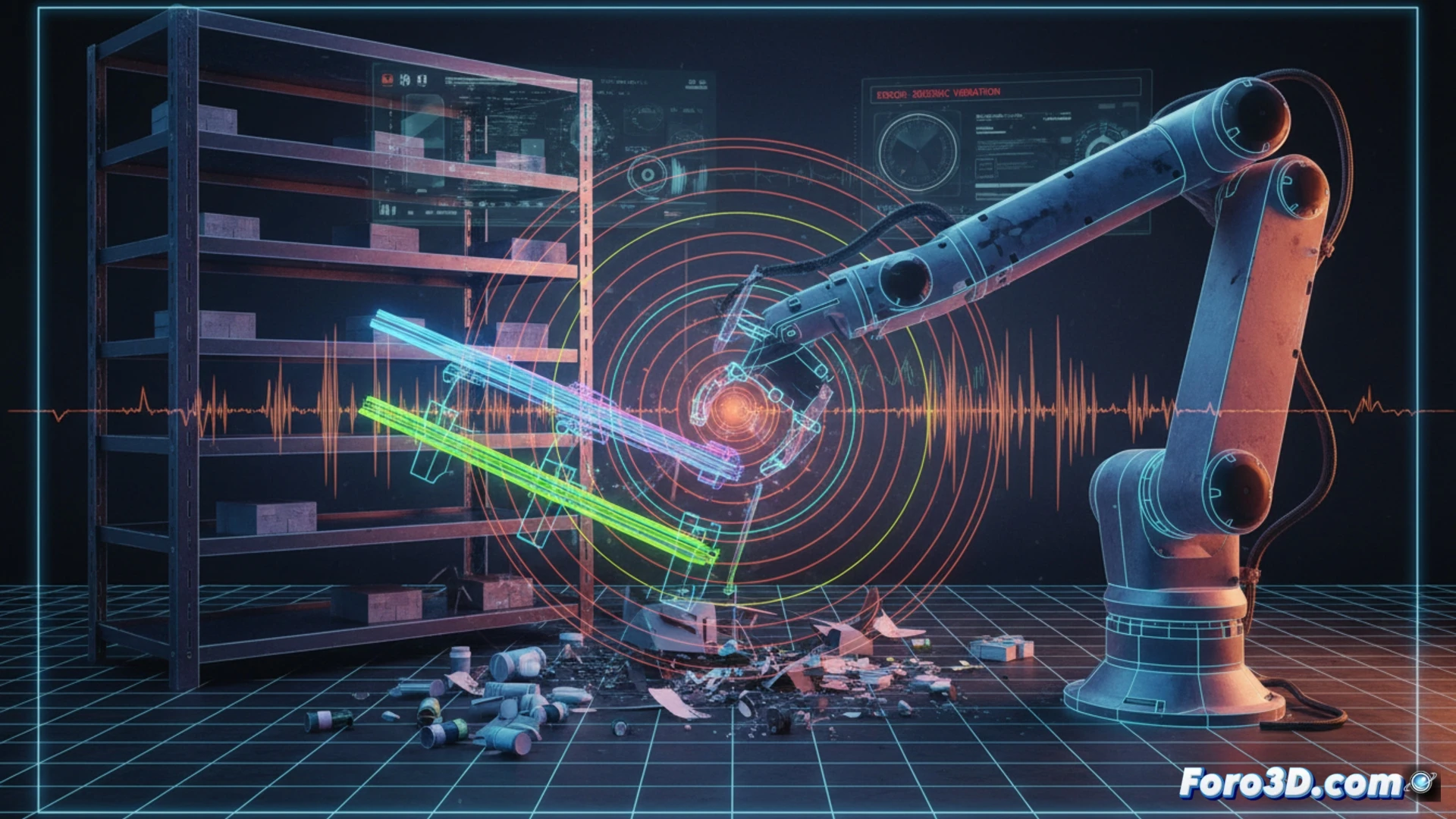
Инцидент произошел в высокоскоростной роботизированной аптеке: роботизированная рука с силой столкнулась со стеллажами системы вертикального хранения. На первый взгляд это выглядело как ошибка программирования, но ремонтная бригада заподозрила внешний фактор. 3D-анализ выявил миллиметровые деформации направляющих рельсов, вызванные сейсмическими вибрациями, не зафиксированными стандартными датчиками здания.
Методология инспекции с использованием RoboGuide, RealWorks и CloudCompare 🤖
Диагностика началась в RoboGuide, где была смоделирована исходная траектория руки. При сравнении с телеметрическими данными ПЛК было обнаружено отклонение в 2,3 мм по оси Z. Для подтверждения причины рельсы были отсканированы лазерным сканером Trimble, а облака точек обработаны в Trimble RealWorks. Выравнивание поверхностей показало выпуклость на левом рельсе. С помощью CloudCompare было проведено сравнение расстояний (M3C2) между текущим состоянием и исходной CAD-моделью, рассчитаны деформации до 1,8 мм в зоне удара. Blender использовался для создания криминалистической анимации, связывающей момент сейсмической вибрации с траекторией конечного эффектора.
Уроки для калибровки автоматизированных систем ⚙️
Этот случай демонстрирует, что роботизированные системы в аптеках требуют структурного мониторинга, выходящего за рамки внутренних датчиков робота. Сейсмические вибрации малой амплитуды, хотя и не повреждают здание, могут разкалибровать прецизионные рельсы. Рекомендуется интегрировать акселерометры в основание стеллажей и проводить периодические 3D-сканирования с помощью CloudCompare для обнаружения субмиллиметровых деформаций до того, как они приведут к столкновениям. Исправление включало перенастройку анкерных креплений рельсов и перекалибровку руки в RoboGuide с новой картой компенсации ошибок.
Насколько надежна модель 3D-анализа столкновений для прогнозирования траекторий фармацевтической роботизированной руки при столкновении с сейсмическими вибрациями, изначально не смоделированными в среде роботизированной аптеки?
(P.S.: Симулировать роботов весело, пока они не решат не подчиняться вашим командам.)