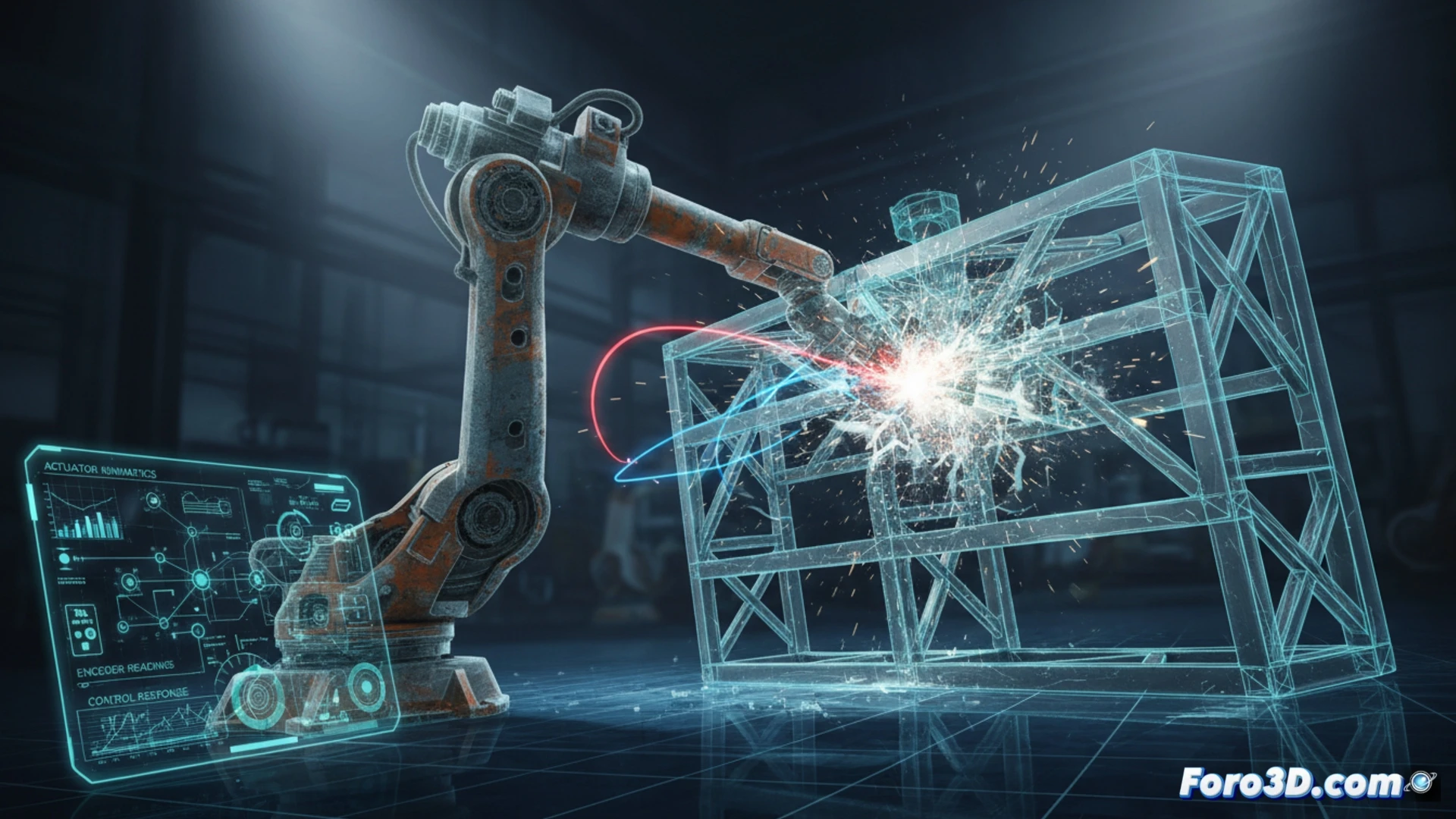
Инцидент, известный как Ошибка Робота-Маляра, вызвал техническую дискуссию в области промышленной безопасности. Роботизированная рука, запрограммированная на нанесение покрытия на автомобильные детали, резко отклонилась от своей траектории, ударившись о металлическую конструкцию. Этот случай становится идеальным объектом для изучения в криминалистическом конвейере, где 3D-реконструкция сцены позволяет изолировать такие переменные, как кинематика привода, показания энкодеров и реакция системы управления.
Симуляция Траекторий и Анализ Механической Неисправности 🔧
Для проведения расследования создается цифровая модель среды с использованием облаков точек, захваченных LiDAR-сканером. Динамическая симуляция роботизированной руки, основанная на логах движения до удара, выявляет аномалию в оси вращения запястья. 3D-криминалистический анализ позволяет изолировать точный момент, когда угловая скорость превысила порог безопасности, что указывает на неисправность волнового редуктора или искажение сигнала резольвера. Этот подход исключает человеческие ошибки и сосредотачивает причину на преждевременном износе механического компонента.
Уроки для Профилактики в Автоматизированных Средах 🛡️
Визуализация аварии с помощью криминалистической анимации не только определяет точку разрушения, но и устанавливает протокол проверки для предиктивного обслуживания. Интеграция датчиков вибрации и мониторинг обратной кинематики в реальном времени могут предвидеть подобные отклонения. Этот случай демонстрирует, что 3D-документация инцидентов является незаменимым инструментом для инженерии безопасности, превращая единичную ошибку в воспроизводимый урок для всей робототехнической отрасли.
Какая методология криминалистического конвейера позволяет отличить алгоритмический сбой в планировании траекторий от неучтенного физического отклонения при 3D-реконструкции ошибки промышленного робота-маляра?
(PS: В криминалистическом конвейере самое главное — не смешивать улики с эталонными моделями... иначе получишь призрак на сцене.)