Недавний инцидент, когда горнодобывающий робот большой грузоподъемности потерпел катастрофический разрыв шарнирной стрелы во время добычи, привлек внимание к механическим отказам в экстремальных условиях. Такая техника, спроектированная для выдерживания циклических нагрузок и абразивных условий, внезапно вышла из строя, что указывает на усталостное разрушение материалов или перегрузку, не обнаруженную системой управления. Анализ этого события с инженерной точки зрения позволяет понять, как оптимизировать конструкцию и мониторинг такого оборудования.
Усталость материалов, перегрузка и ошибки ПО при отказе ⚙️
Технические причины этого разрыва можно разделить на три основных направления. Во-первых, усталость материалов: горнодобывающий робот работает в условиях постоянных вибраций и ударов, что приводит к образованию микротрещин в стальных или алюминиевых сплавах, которые со временем перерастают в хрупкое разрушение. Во-вторых, эксплуатационная перегрузка: если система датчиков неправильно откалибровала вес добытого материала или робот превысил свой максимальный крутящий момент при принудительном повороте, напряжение в приводах и соединениях превысило предел упругости. В-третьих, возможная ошибка программного обеспечения в управлении траекториями, когда дефектный контур обратной связи дал команду на резкое движение без компенсации инерции, создав пик напряжения в критической точке конструкции.
Как 3D-симуляция и цифровые двойники предотвращают такие отказы 🛠️
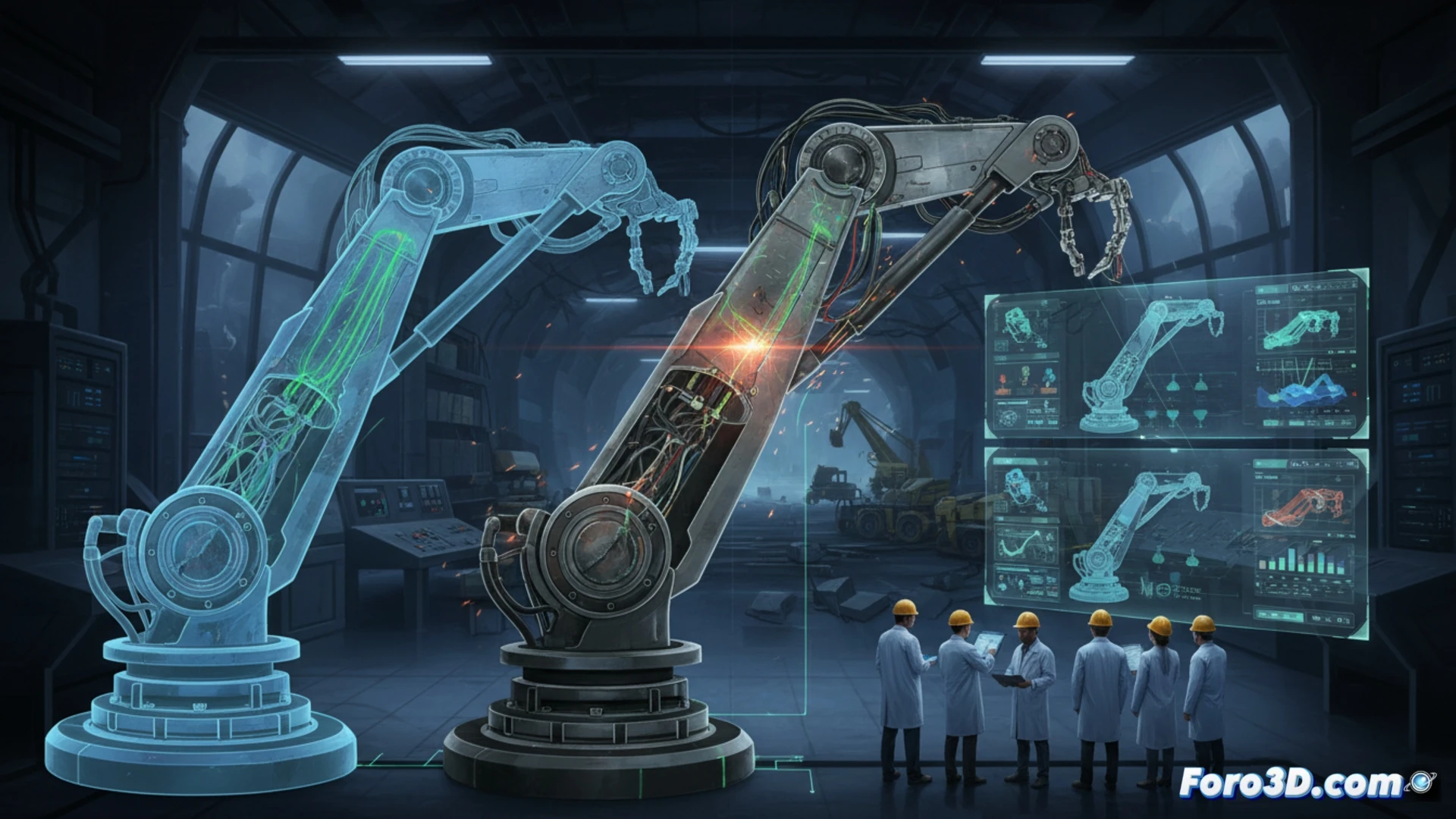
Моделирование с помощью цифровых двойников является ключевым инструментом для прогнозирования и предотвращения этого разрыва. Моделируя робота в 3D с данными о напряжении-деформации, можно визуализировать тепловые карты, указывающие на критические точки накопления усталости, такие как шарнирные соединения или сварные швы стрелы. Цифровой двойник позволяет выполнять тысячи циклов виртуальной нагрузки без износа реального оборудования, выявляя перегрузки до их возникновения. Кроме того, он интегрирует данные с датчиков IoT для предупреждения об аномальных вибрациях, останавливая машину при первых признаках микротрещины, предотвращая тем самым катастрофические разрушения в автоматизированной горной добыче.
Как цифровой двойник может точно предсказать и предотвратить режимы усталостного отказа в шарнирной стреле горнодобывающего робота до того, как произойдет катастрофический разрыв, учитывая такие переменные, как динамическая нагрузка и абразивный износ подземной среды?
(P.S.: Симулировать роботов весело, пока они не решат не следовать вашим командам.)