A robótica aprende da anatomia natural para avançar
Enquanto os robôs quadrúpedes atuais demonstram uma agilidade surpreendente, sua base tecnológica difere radicalmente dos sistemas que a natureza aperfeiçoou. A engenharia robótica começa a observar com atenção os princípios biomecânicos para dar um salto qualitativo. 🔬
O domínio dos atuadores rotativos
A indústria se apoia quase completamente em motores elétricos para gerar movimento. Esses componentes oferecem uma precisão elevada e são relativamente simples de controlar por meio de software avançado. Permitem que as plataformas robóticas processem dados de sensores, calculem trajetórias e mantenham uma estabilidade dinâmica em tempo real sobre superfícies complexas.
Vantagens chave dos motores elétricos:- Alta precisão e potência em um pacote compacto.
- Fácil integração com sistemas eletrônicos de controle.
- Capacidade para executar movimentos complexos e coordenados de forma repetitiva.
“Às vezes, para avançar, a engenharia deve olhar para trás. O futuro da locomoção robótica pode estar em redescobrir como se move um gato.”
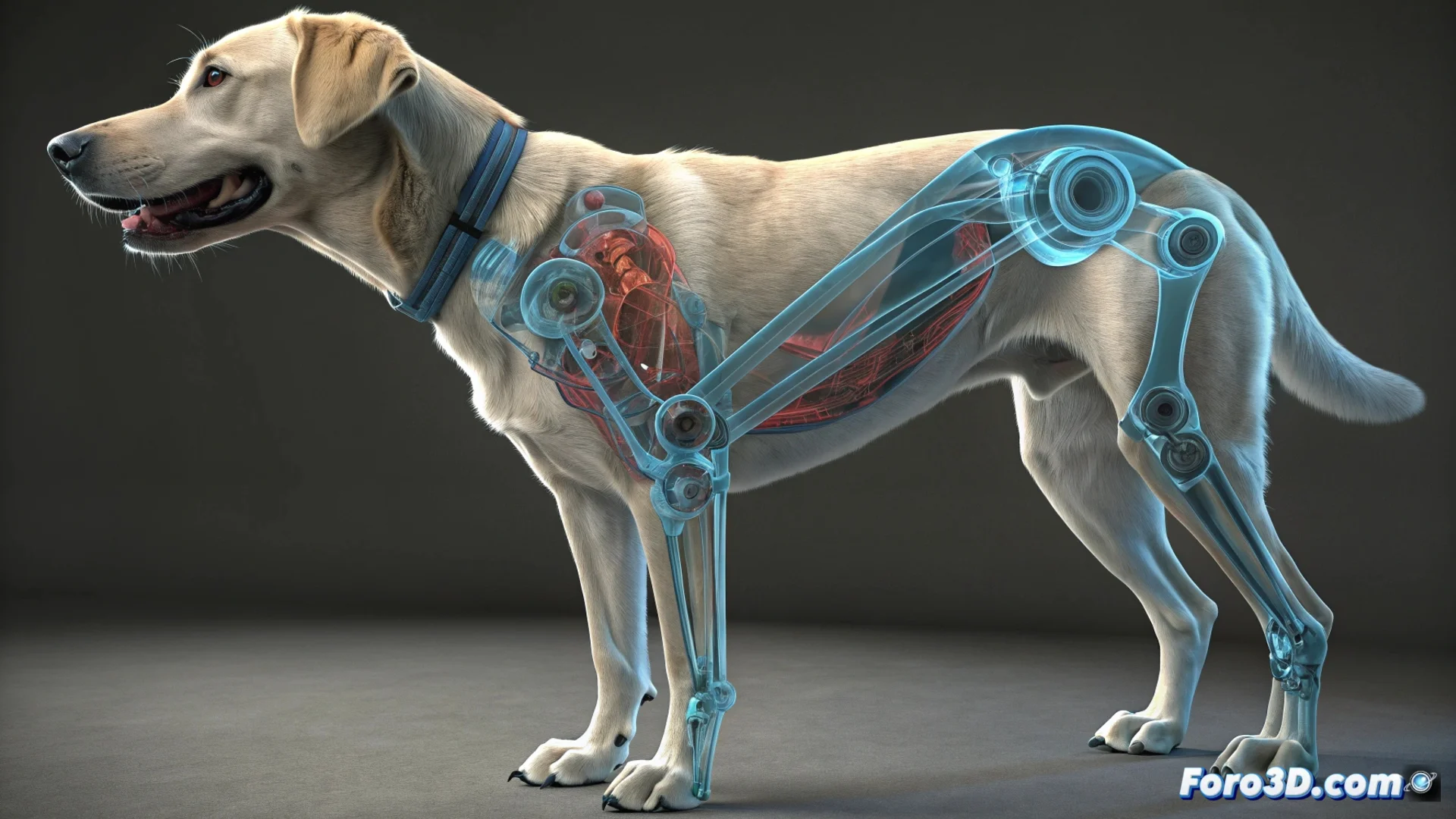
A lição de milhões de anos de evolução
A anatomia natural não emprega motores, mas um sistema de fibras musculares que se contraem. Essa abordagem gasta energia de maneira mais adaptável e se recupera melhor de impactos. Os músculos e tendões funcionam simultaneamente como atuadores, amortecedores e molas, armazenando e liberando energia elástica com grande eficiência.
Benefícios de imitar a biomecânica:- Robôs mais leves e com um movimento perceptivelmente mais natural.
- Redução significativa do ruído operacional.
- Menor gasto da bateria ao aproveitar a energia elástica.
Um caminho para robôs mais capazes
Integrar princípios da biomecânica na robótica não significa abandonar a eletrônica, mas complementá-la. O objetivo é desenvolver sistemas híbridos ou novos atuadores que capturem a versatilidade e resiliência do tecido muscular. Essa abordagem bioinspirada promete máquinas que não apenas se desloquem, mas interajam com o ambiente de uma maneira radicalmente superior e eficiente. 🚀