올리브 재배는 사다리 추락, 트랙터 전복, 농약 노출과 같은 심각한 위험 요소를 내포하고 있습니다. 공정 시뮬레이션 분야에서는 이러한 변수들을 가상 환경에서 모델링하여 사고를 예측합니다. 경사지에서의 수확 작업이나 진동기 사용을 디지털로 재현하면 추락의 운동학과 화학 물질의 확산을 분석할 수 있으며, 작업자를 위험에 노출시키지 않고 안전 프로토콜을 재설계하기 위한 정확한 데이터를 제공합니다.
위험 모델링 및 가상 인체 공학 🛠️
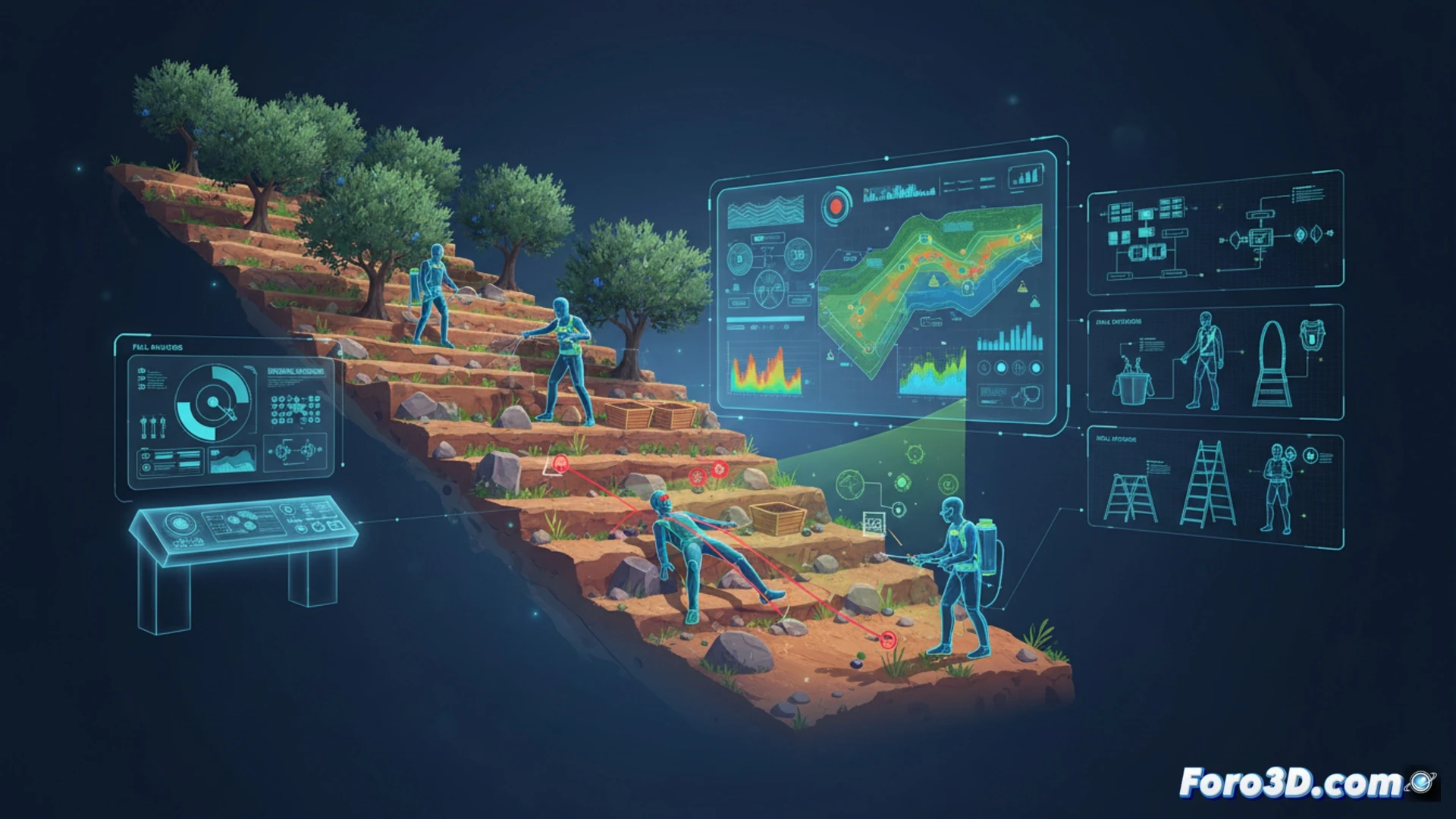
3D 시뮬레이션은 올리브 재배자의 각 작업을 측정 가능한 변수로 분해합니다. 예를 들어, 진동기가 장착된 트랙터 사용을 모델링할 때는 불규칙한 지형에서의 전복 각도와 생체역학적 아바타를 통한 작업자의 구조적 피로도를 계산합니다. 수동 가지치기나 수확의 경우, 가지가 떨어지는 궤적과 15% 이상의 경사에서의 관절 압력을 시뮬레이션합니다. 이 분석을 통해 사다리 위치나 안전 벨트 디자인을 조정하여 요통과 충격의 위험을 줄일 수 있습니다. 또한, 화학 물질 노출은 가상 입자를 통해 시각화되어 현장 재진입 시간과 필요한 환기 조건을 최적화합니다.
실제 예방을 위한 몰입형 교육 🎯
분석을 넘어, 공정 시뮬레이션은 올리브 재배자들이 올리브 농장의 디지털 트윈에서 훈련받을 수 있도록 합니다. 작업자는 가상 경사지에서 안전한 트랙터 운전을 연습하고 실제 결과 없이 피로 신호를 식별하는 방법을 배웁니다. 이 접근 방식은 이론을 실무 경험으로 전환하여 사고율을 줄입니다. 이러한 모델에 투자하는 것은 생명을 구할 뿐만 아니라 사고로 인한 중단을 최소화하고 각 수확 시 인체 공학을 개선하여 생산성을 최적화합니다.
3D 시뮬레이션이 어떻게 올리브 농장의 위험 요소(예: 불규칙한 지형 위 사다리의 안정성이나 다양한 바람 조건에서 농약의 비산)를 충실히 재현하여 작업자를 실제 위험에 노출시키지 않고 훈련시킬 수 있을까요?
(추신: 산업 공정을 시뮬레이션하는 것은 미로 속 개미를 보는 것과 같지만, 더 비쌉니다.)