피부과 시술을 보조하도록 설계된 협동 로봇이 환자에게 의도치 않은 깊은 절개를 가했습니다. 힘 센서의 3D 재구성과 환자의 포인트 클라우드 매핑을 통한 사고의 포렌식 분석 결과, 치명적인 이상 징후가 밝혀졌습니다. 협동 로봇이 수술용 거즈를 피부 표면으로 착각한 것입니다. 이 사례는 의료 환경에서 촉각 인식의 위험성을 강조합니다.
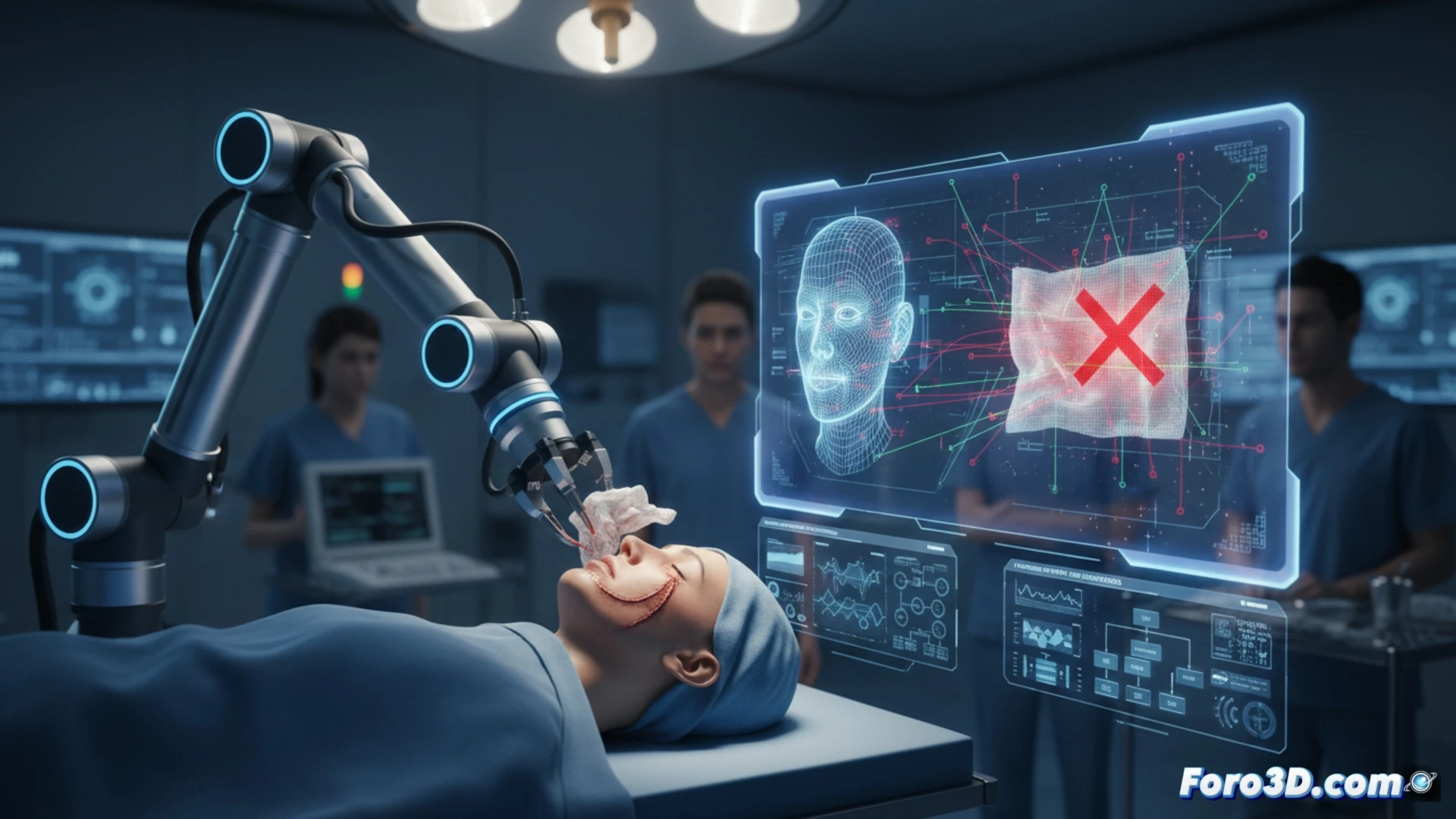
오류 재구성: 디지털 트윈과 포인트 클라우드 🛠️
운동학 시뮬레이션을 위한 RoboGuide와 디지털 트윈을 위한 Unreal Engine 5를 사용하여 수술 시나리오가 재현되었습니다. 토크 센서 데이터를 디지털 트윈에 통합하여 계획된 경로의 이탈을 시각화할 수 있었습니다. 사고 후 포인트 클라우드에 대한 CloudCompare 분석은 환자 표면의 불연속성을 보여주었습니다. 알고리즘 비교 결과, 로봇 데이터베이스에 연조직으로 저장된 거즈의 기계적 임피던스가 잘못된 접촉 판독값을 생성하여 절개 동작을 촉발한 것으로 나타났습니다.
감각 오류에 대한 방패로서의 3D 시뮬레이션 🛡️
이 사고는 3D 시뮬레이션이 단순한 설계 도구가 아니라 중요한 안전 감사 도구임을 보여줍니다. 디지털 트윈 내 실시간 포인트 클라우드 데이터 통합을 통해 재료(거즈 대 표피) 간의 혼동을 식별할 수 있었습니다. 수술 자동화에 있어 과제는 팔의 정밀도뿐만 아니라 비강체 물체를 식별하는 인식 알고리즘의 능력입니다. 교훈은 분명합니다. 협동 로봇이 자신의 촉각을 의심하도록 훈련해야 한다는 것입니다.
협동 로봇 업계는 미용 수술과 같은 정밀 의료 응용 분야에서 안전을 위협하는 촉각 오류를 방지하기 위해 어떻게 중복된 햅틱 피드백 시스템을 통합할 수 있을까요?
(추신: 로봇을 시뮬레이션하는 것은 재미있습니다. 명령을 따르지 않기로 결정할 때까지는요.)