자율 수하물 관리 로봇이 강한 일사량이 내리쬐는 시간대에 공항 터미널에서 승객을 치었습니다. 법의학 조사는 로봇의 스테레오 카메라 시스템의 시야를 재구성하여 광택 바닥에 반사된 햇빛이 깊이 오류 영역을 생성했는지 여부를 확인하는 데 초점을 맞췄습니다. 이 사례는 극한의 환경 조건으로 인해 시각적 인식이 실패한 자율 시스템 사고 분석에 3D 기술을 적용한 이정표가 되었습니다.
법의학 워크플로우: 사진측량, LiDAR 및 Unreal Engine 5 시뮬레이션 🛠️
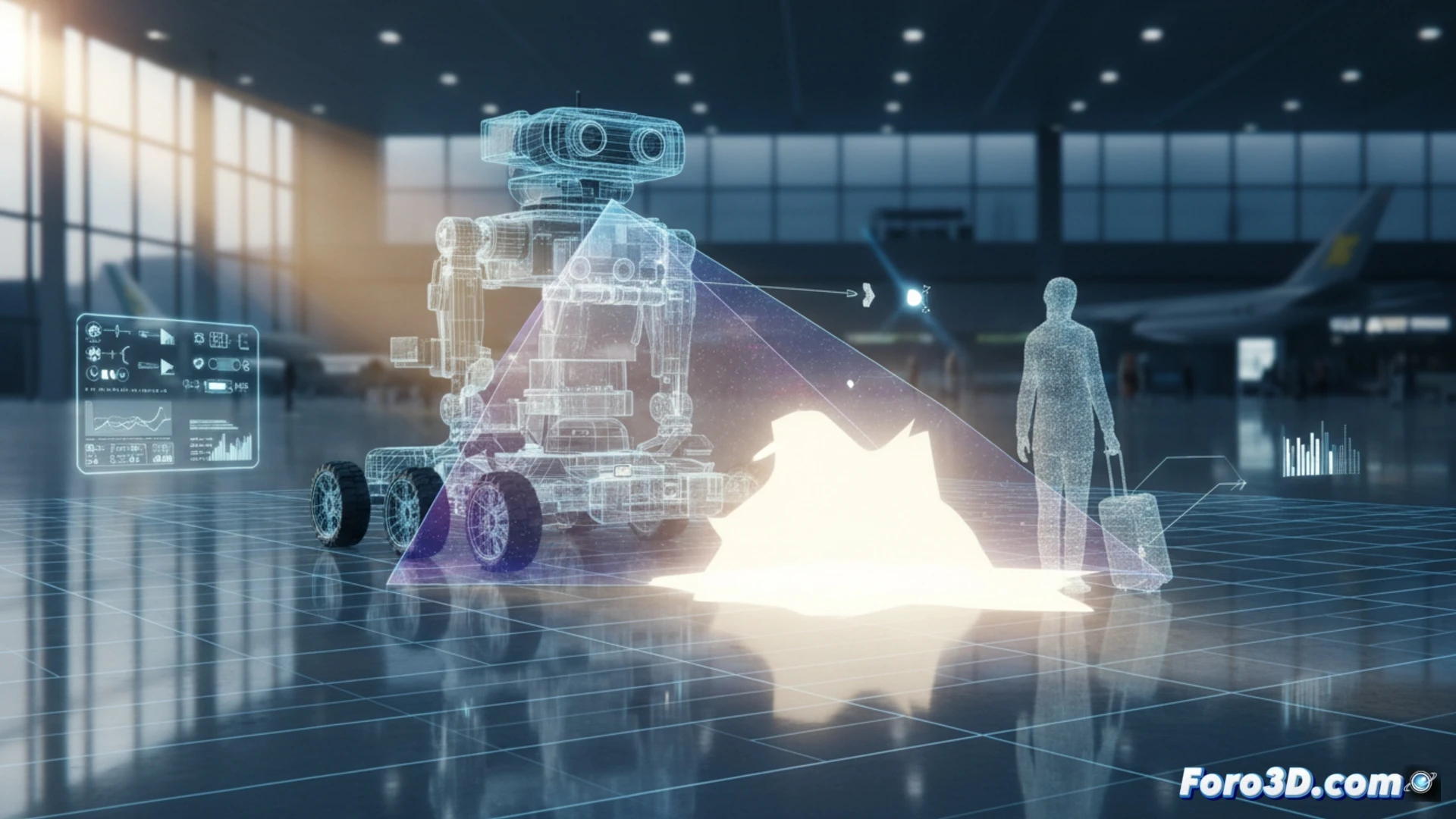
프로세스는 LiDAR 스캔과 RealityCapture를 사용한 사진측량을 통해 사고 지역의 데이터를 캡처하여 바닥과 충격 지점의 고밀도 포인트 클라우드를 생성하는 것으로 시작되었습니다. CloudCompare에서는 환경 데이터를 로봇의 CAD 모델과 정렬하여 사고 당시 센서의 정확한 위치를 재현했습니다. 그런 다음 Unreal Engine 5에서 스테레오 시야를 시뮬레이션하고 바닥에 반사 재질을 적용하고 실제 태양광 조명을 구성했습니다. 시뮬레이션 결과, 반사광이 특정 영역의 픽셀을 포화시키는 밝기 구배를 생성하여 양안 시차를 무효화하고 승객이 있던 바로 그 위치에 직경 40cm의 광학 사각지대를 생성하는 것으로 확인되었습니다.
자율 로봇공학 센서 설계를 위한 교훈 🤖
이 감정은 스테레오 비전 시스템이 통제된 조건에서는 강력하지만, 반사 표면과 극심한 조명 변화에 취약하다는 것을 보여줍니다. 사진측량, 포인트 클라우드 정렬 및 센서 시뮬레이션을 결합한 적용된 방법론은 향후 자율 로봇 사고에 대한 재현 가능한 법의학 파이프라인을 구축합니다. 태양광 반사 가설의 검증은 제조업체가 공항 환경에서 이러한 광학 사각지대를 완화하기 위해 비행 시간 LiDAR와 같은 센서 중복성을 통합하도록 강제합니다.
법의학 3D 재구성이 공항 사고 중 자율 로봇의 경로에 투영된 그림자에 의한 시각적 폐색의 영향을 어떻게 식별할 수 있습니까?
(추신: 법의학 파이프라인에서 가장 중요한 것은 증거와 참조 모델을 혼동하지 않는 것입니다... 그렇지 않으면 현장에 유령이 나타날 수 있습니다.)