고정밀 간 생검을 위해 설계된 자율 수술 로봇이 시술 중 혈관 열상을 유발했습니다. 처음에는 소프트웨어 오류로 여겨졌던 이 사건은 3D 법의학 감정을 받았습니다. 조사는 Ansys의 유한 요소 시뮬레이션과 바늘의 미터법 스캔을 결합하여 고장 역학을 재구성했으며, 근본 원인이 알고리즘적이 아닌 기계적 및 조직적임을 입증했습니다.
유한 요소 시뮬레이션 및 바늘 스캔 🧬
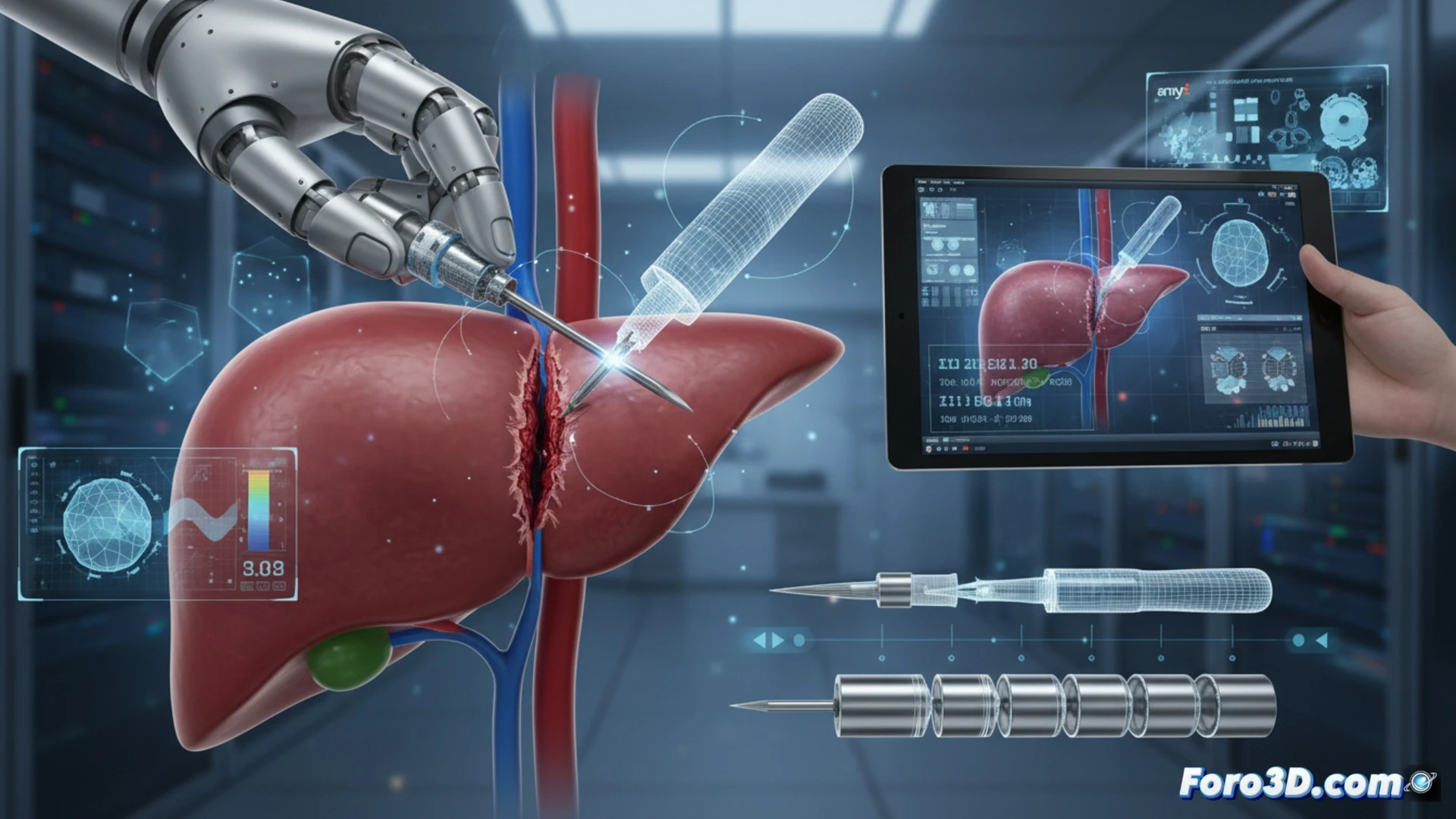
법의학 팀은 3D 스캔을 통해 바늘의 정확한 형상을 디지털화하여 Ansys의 유한 요소 모델에 통합했습니다. 방향에 따라 강도가 다른 콜라겐 섬유로 특징지어지는 간 실질의 이방성이 재현되었습니다. 시뮬레이션은 높은 섬유증 밀도를 가진 간엽을 통과할 때 바늘 끝이 비대칭 굽힘 모멘트를 경험함을 보여주었습니다. 로봇의 강체 유도 알고리즘에서 고려되지 않은 이 토크는 궤적을 4.2밀리미터 편향시켜 인접한 문맥 혈관을 절단하기에 충분했습니다.
자율 수술 로봇 공학을 위한 교훈 🤖
감정 결과는 현재의 제어 모델이 살아있는 조직의 생체역학적 상호작용을 과소평가하고 있음을 입증합니다. 향후 의인성 손상을 방지하기 위해 자율 탐색 알고리즘은 수술 전 탄성초음파검사 또는 실시간 시뮬레이션을 통해 얻은 조직 이방성 데이터를 통합해야 합니다. Materialise Mimics에서 생성된 것과 같은 간 디지털 트윈을 통합하면 힘과 삽입 각도를 동적으로 조정하여 모델의 이론적 강성과 장기의 실제 복잡성 사이의 격차를 해소할 수 있습니다.
이 간 바늘 고장에 대한 3D 감정에서 자율 수술 로봇의 피드백 센서 설계에 관한 어떤 교훈을 얻을 수 있으며, 이를 통해 향후 혈관 열상을 예방할 수 있을까요?
(추신: 인쇄된 장기가 뛰지 않는다면, 항상 작은 모터를 추가할 수 있습니다... 농담입니다!)