항공기 조립 공장의 야간 교대 근무 중, 동체의 중요한 부분에서 리벳이 잘못 배치된 것이 발견되었습니다. 육안으로는 오류가 보이지 않았지만, GOM Inspect를 사용한 치수 검사에서 밀리미터 단위의 편차가 드러났습니다. 초기 가설은 작업자를 안내하는 레이저 프로젝션 시스템의 보정 오류를 지목했으며, 이는 인근 중장비의 환경 진동으로 인해 발생했을 가능성이 제기되었습니다.
포렌식 흐름: 로그, 메쉬 및 시간적 상관 관계 🔍
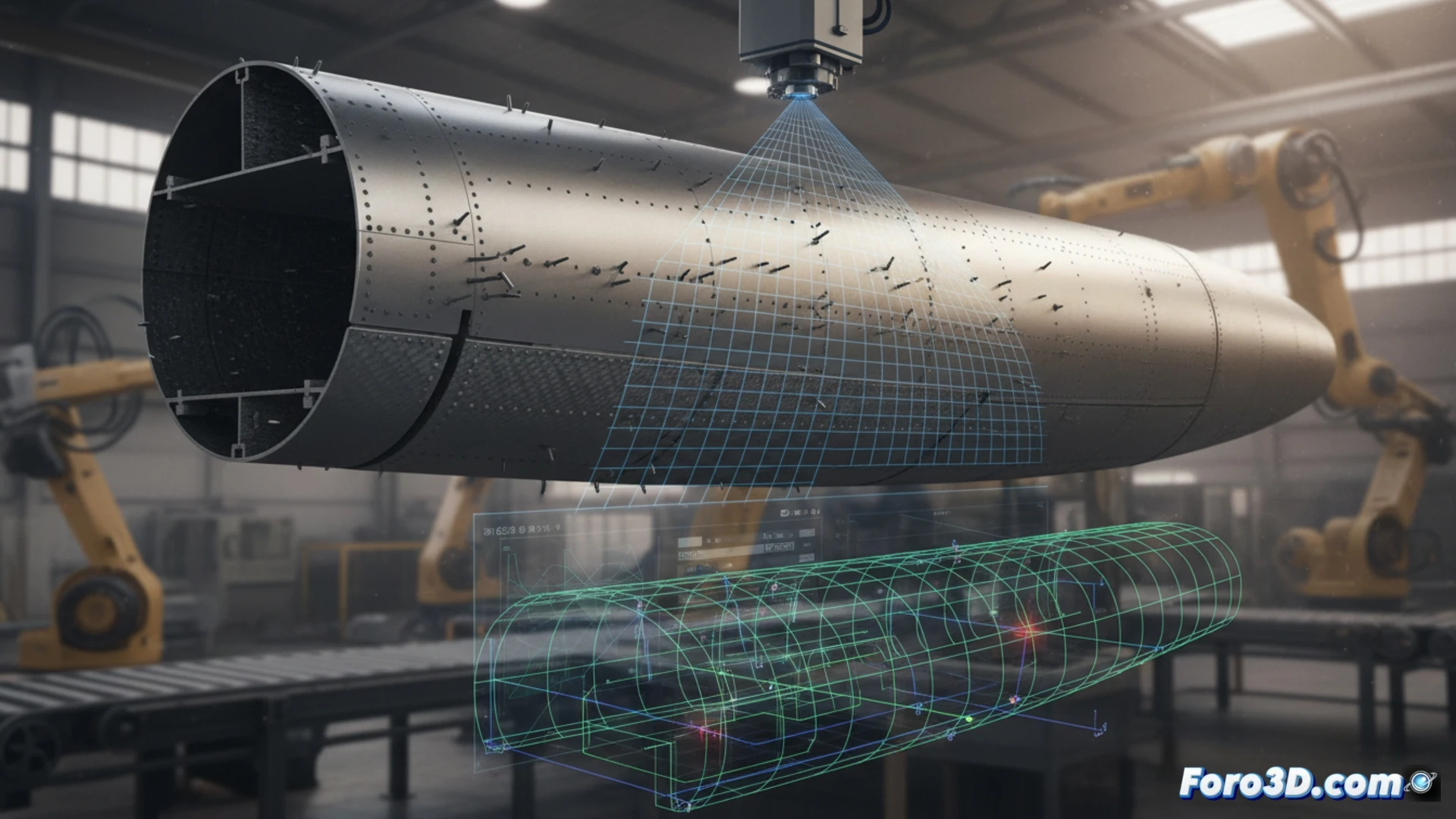
감정은 Vuforia Engine 시스템의 로그를 추출하는 것으로 시작되었으며, 이 로그는 각 프로젝션 펄스와 작업장의 환경 조건을 기록합니다. 오전 2시 47분에 진동 피크가 식별되었으며, 이는 교대 근무 시작 시간과 일치했습니다. 그런 다음 CATIA의 원본 설계 파일을 가져와 GOM Inspect에서 스캔한 동체의 포인트 클라우드와 비교했습니다. 중첩 결과 프로젝터에서 0.15도의 회전이 나타났으며, 이는 기준점을 2.3mm 이동시키기에 충분했습니다. 타임스탬프의 교차 분석을 통해 오류가 패널 운반차가 3미터 거리를 통과한 직후에 발생했음이 확인되었습니다.
산업 포렌식 파이프라인을 위한 교훈 ⚙️
이 사례는 조립 오류가 항상 인간의 실수로 인한 것이 아니라 때로는 디지털 가이드 체인의 시스템적 결함임을 보여줍니다. 3D 감정의 핵심은 로그의 시간적 데이터를 정밀한 기하학적 모델과 상호 연관시키는 것이었습니다. 해결책은 레이저를 재보정하는 것이 아니라 진동원으로부터 물리적으로 격리하는 것이었습니다. 향후 포렌식 파이프라인을 위해 Vuforia 생태계 내에 실시간 진동 센서를 통합하여 오류가 동체에 실제로 발생하기 전에 경고할 것을 권장합니다.
야간 조립 환경에서 저주파 진동을 받는 리벳의 동적 거동을 모델링하고 검증하여 3D 포렌식 감정에서 공정 오류와 재료 피로를 어떻게 구별할 수 있을까요?
(추신: 포렌식 파이프라인에서 가장 중요한 것은 증거와 참조 모델을 혼동하지 않는 것입니다... 그렇지 않으면 씬에 유령이 나타나게 될 것입니다.)