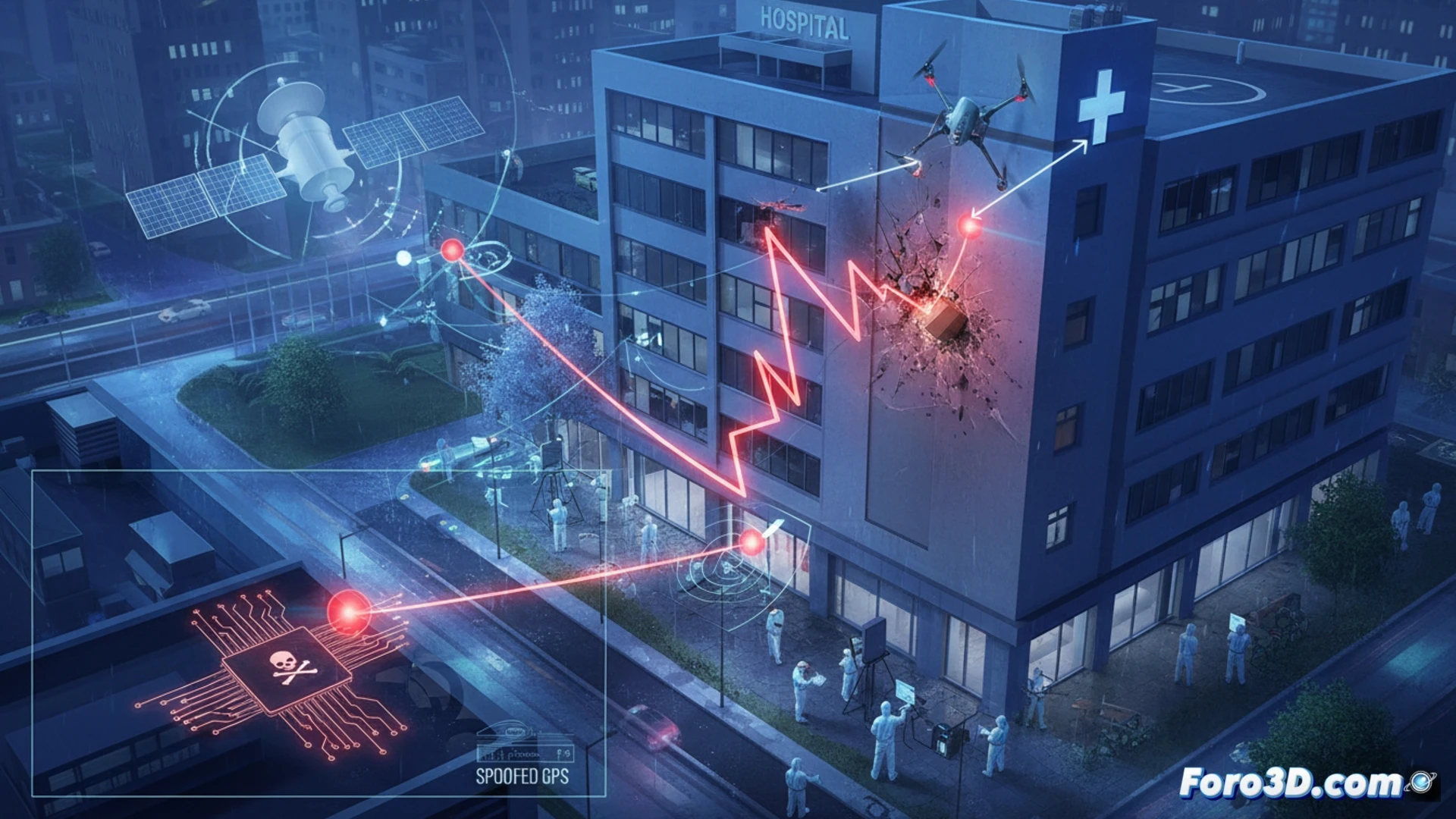
배달 드론이 병원 외벽에 충돌하여 사보타주 가능성에 대한 조사가 시작되었습니다. 비행 원격 측정 및 현장 스캔을 기반으로 한 법의학 분석 결과, 프로그래밍된 경로에서 급격한 이탈이라는 치명적인 이상 징후가 발견되었습니다. 원인은 위성 좌표를 악의적으로 대체하여 항공기를 잘못된 방향으로 유도한 GPS 스푸핑으로 알려진 외부 간섭으로 지목되었습니다.
법의학 흐름: 포인트 클라우드에서 언리얼 엔진 시뮬레이션까지 🛸
재구성 과정은 FARO Scene을 사용한 현장 캡처로 시작되어 병원과 충돌 지점의 고정밀 포인트 클라우드를 생성했습니다. 동시에 IMU 및 GPS 데이터를 포함한 드론의 원격 측정 데이터가 추출되었습니다. 계획된 경로와 기록된 궤적 간의 불일치는 명백했습니다. 이탈을 시각화하기 위해 포인트 클라우드가 언리얼 엔진으로 가져와져 실제 비행이 시뮬레이션되었습니다. 시뮬레이션은 드론이 가짜 GPS 신호를 수신했을 때 제동 명령을 무시하고 건물 쪽으로 45도 강제 회전을 실행했음을 보여주었습니다. Pix4D 분석은 충돌 지점이 이탈 벡터의 정점과 정확히 일치하여 기계적 또는 배터리 고장 가능성을 배제했습니다.
항공 물류 보안에 대한 시사점 🚁
이 사례는 상업용 드론의 항법 시스템에 있는 치명적인 취약점을 드러냅니다. GPS 스푸핑은 경로를 이탈시켰을 뿐만 아니라 기내 안전 프로토콜을 무력화했습니다. 배송 업계에 대한 교훈은 분명합니다. 드론이 가짜 좌표를 감지하고 거부할 수 있도록 신호 인증 시스템과 중복 센서(예: 시각적 주행 거리 측정 또는 무선 비콘)를 구현하는 것이 필요합니다. FARO와 언리얼로 수행된 것과 같은 법의학 재구성은 향후 사고 원인을 입증하고 이러한 유형의 공격에 대한 규제를 강화하는 데 필수적인 도구가 됩니다.
사고 배달 드론의 법의학 분석에서 GPS 스푸핑이 의도적인 외부 공격에 의한 것인지 병원 환경의 우발적 간섭에 의한 것인지 어떻게 구별할 수 있습니까?
(추신: 컴퓨터가 타버리고 당신이 그 재앙이 되기 전까지는 재앙 시뮬레이션이 재미있습니다.)