지난 주말, 증강 현실 하이브리드 놀이기구에서 발생한 사고로 여러 탑승객이 심한 방향 감각 상실과 경미한 충격을 입었습니다. 제동 순서 오류 때문이었죠. 이후 분석은 물리적 검사에 그치지 않고, 궤도의 디지털 트윈을 활용하여 근본 원인을 파악했습니다. 시스템 로그와 3D 스캔 데이터로 구동된 가상 복제본은 LiDAR 위치 측정의 치명적인 지연 시간을 식별했고, 이로 인해 자기 브레이크가 차량의 실제 위치와 동기화되지 않았습니다.
Unity 3D 및 Solid Edge를 활용한 포렌식 진단 🛠️
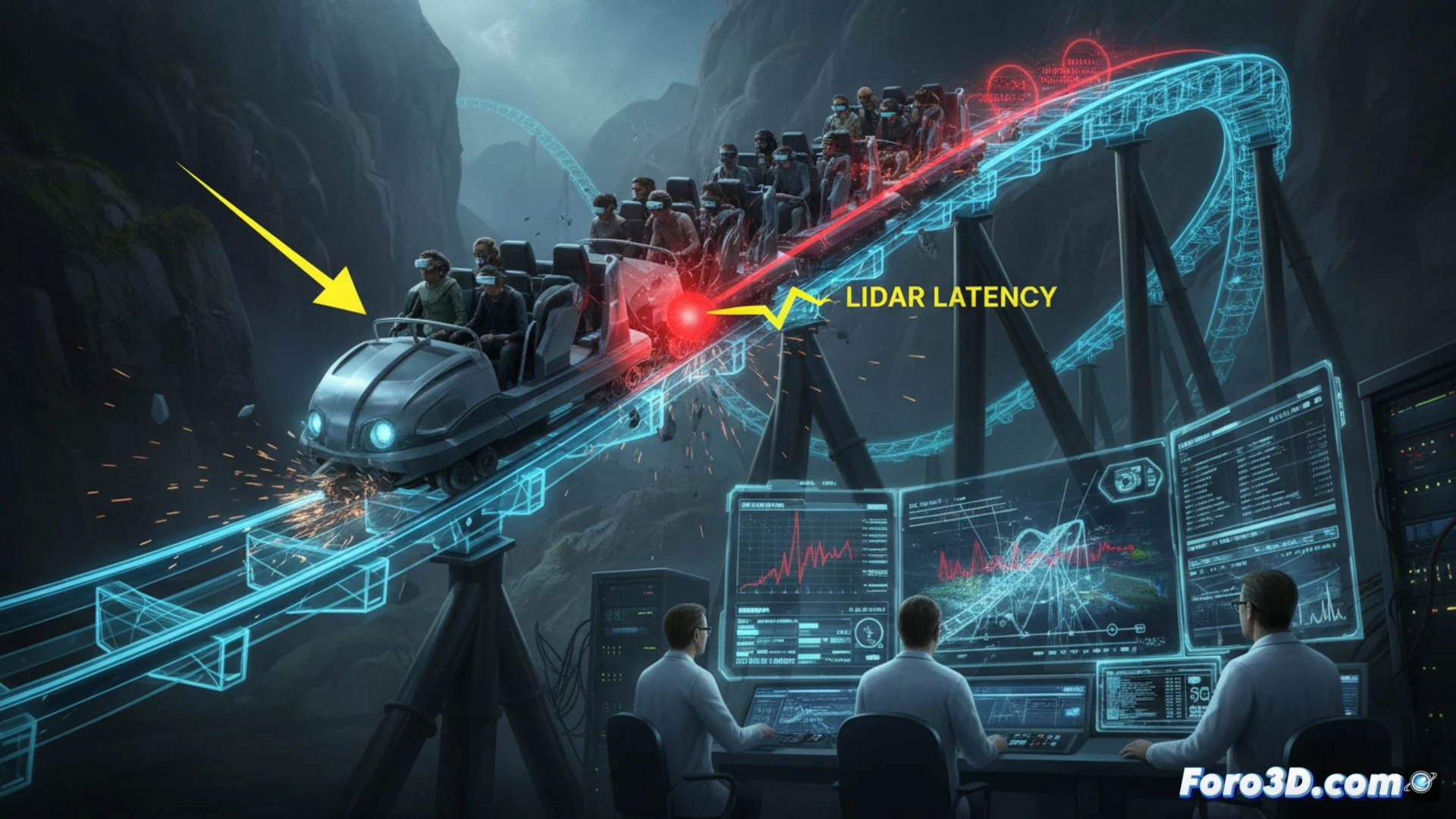
조사 과정은 Artec Studio 스캐너를 사용한 고정밀 궤도 스캔으로 시작되어 금속 구조물과 레일의 모든 밀리미터를 포착했습니다. 이 포인트 클라우드는 Solid Edge에 통합되어 기계 부품과 제동 시스템의 액추에이터를 모델링했습니다. 이후 모델은 Unity 3D로 내보내져 기능성 디지털 트윈이 구축되었습니다. 제어 시스템의 시간 로그를 입력하자 실시간 시뮬레이션이 정확히 고장을 재현했습니다. LiDAR 신호의 47밀리초 지연으로 인해 객차가 이미 작동 지점을 지난 후에 자기 제동 명령이 실행된 것입니다. 표준 모니터에서는 감지할 수 없었던 이 지연은 가상 궤적을 원격 측정 데이터에 겹쳐 놓으면서 명확히 드러났습니다.
핵심 시스템 시뮬레이션을 위한 교훈 ⚠️
이 사례는 디지털 트윈이 단순한 설계 도구를 넘어 물리적 사이버 보안 및 센서 신뢰성을 위한 테스트베드로서의 중요성을 강조합니다. 오프라인 시뮬레이션에서 종종 무시되는 위치 측정 지연이 실제 위험 요소로 작용했습니다. 테마파크 및 로봇 공학 업계는 이러한 시간 차이를 예측하기 위해 디지털 트윈에 네트워크 지연 및 센서 지터 모델을 통합해야 합니다. 기술은 기계적 오류가 아닌, 현실 세계와 가상 그림자 간의 디지털 통신 시간 문제로 인해 실패한 것입니다.
사고가 디지털 트윈의 LiDAR 시스템에서 감지되지 않은 지연 시간으로 인해 발생했다는 점을 고려할 때, 비상 제동 중에 가상 복제본이 놀이기구의 물리적 상태를 정확히 반영하도록 보장하기 위해 어떤 실시간 동기화 프로토콜을 구현해야 할까요?
(추신: 제 디지털 트윈은 지금 회의 중이고, 저는 여기서 모델링을 하고 있습니다. 그러니 기술적으로 저는 두 곳에 동시에 있는 셈이네요.)