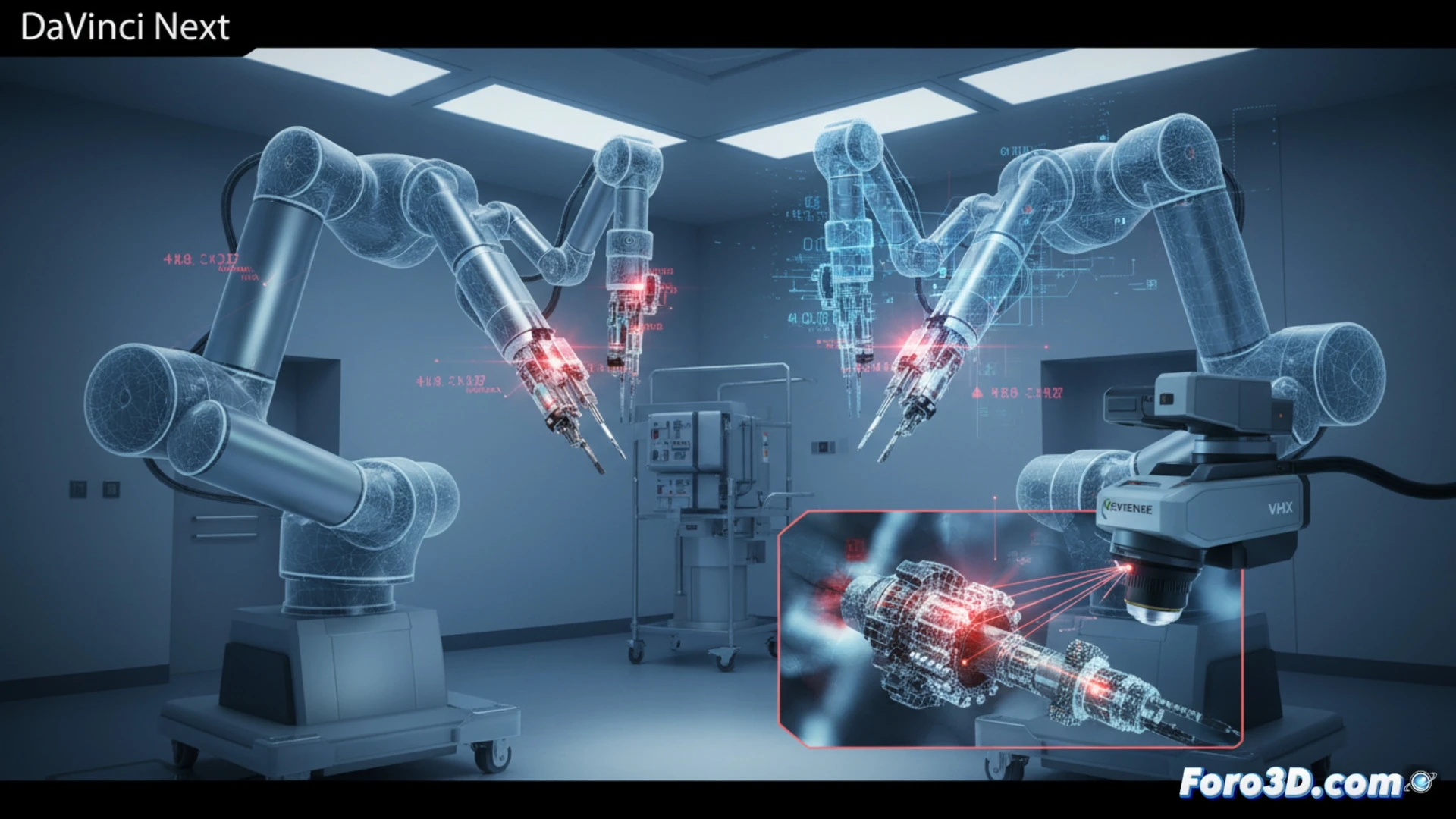
DaVinci Next 시스템을 이용한 수술 중 로봇 팔이 명령되지 않은 움직임을 실행하여 시술의 안전성을 위협했습니다. 이 사건은 RoboGuide를 이용한 시뮬레이션, 로봇의 디지털 트윈 연구, Keyence VHX 3D 현미경을 통한 마이크로 서보 검사를 결합한 심층 포렌식 분석을 촉발했으며, 표준 진단 소프트웨어로는 감지할 수 없는 초기 고장을 밝혀냈습니다.
RoboGuide 및 MATLAB을 이용한 명령되지 않은 움직임 재구성 🤖
엔지니어링 팀은 로봇의 원격 측정 로그를 MATLAB에 로드하여 정확한 명령 시퀀스와 편차를 식별했습니다. 3번 팔의 마이크로 서보에서 비정상적인 전류 스파이크가 감지되었습니다. 고장의 운동학을 시각화하기 위해 디지털 트윈 모델을 RoboGuide로 가져와 원치 않는 궤적을 재현했습니다. 시뮬레이션은 각도 편차가 서보의 유성 기어에 있는 미세 균열과 일치함을 확인했으며, 이는 Keyence VHX 3D 현미경으로 500배 확대 시에만 가시적이었고, 재료 피로로 인한 마모 흔적이 명확하게 나타났습니다.
의료 자동화의 예측 유지보수를 위한 교훈 🔬
이 사례는 수술 로봇 공학의 신뢰성이 기능 테스트에만 의존할 수 없음을 보여줍니다. RoboGuide 시뮬레이션 및 3D 현미경 분석과 디지털 트윈을 통합하면 예측 마모 모델을 생성할 수 있습니다. MATLAB 로그를 Keyence 이미지와 상호 연관시킴으로써 치명적인 고장을 예측하는 진동 또는 전류 임계값을 설정할 수 있습니다. 업계의 경우, 이는 물리적 및 디지털 검사의 하이브리드 접근 방식을 채택하여 자동화의 안전 표준을 높이는 것을 의미합니다.
기계적 마모 현미경 데이터와 디지털 트윈을 실시간으로 통합하여 DaVinci Next 로봇 팔의 수술 중 고장을 예측하는 것이 가능할까요? 🏥
(추신: 로봇을 시뮬레이션하는 것은 재미있지만, 명령을 따르지 않기로 결정할 때까지는 그렇습니다.)