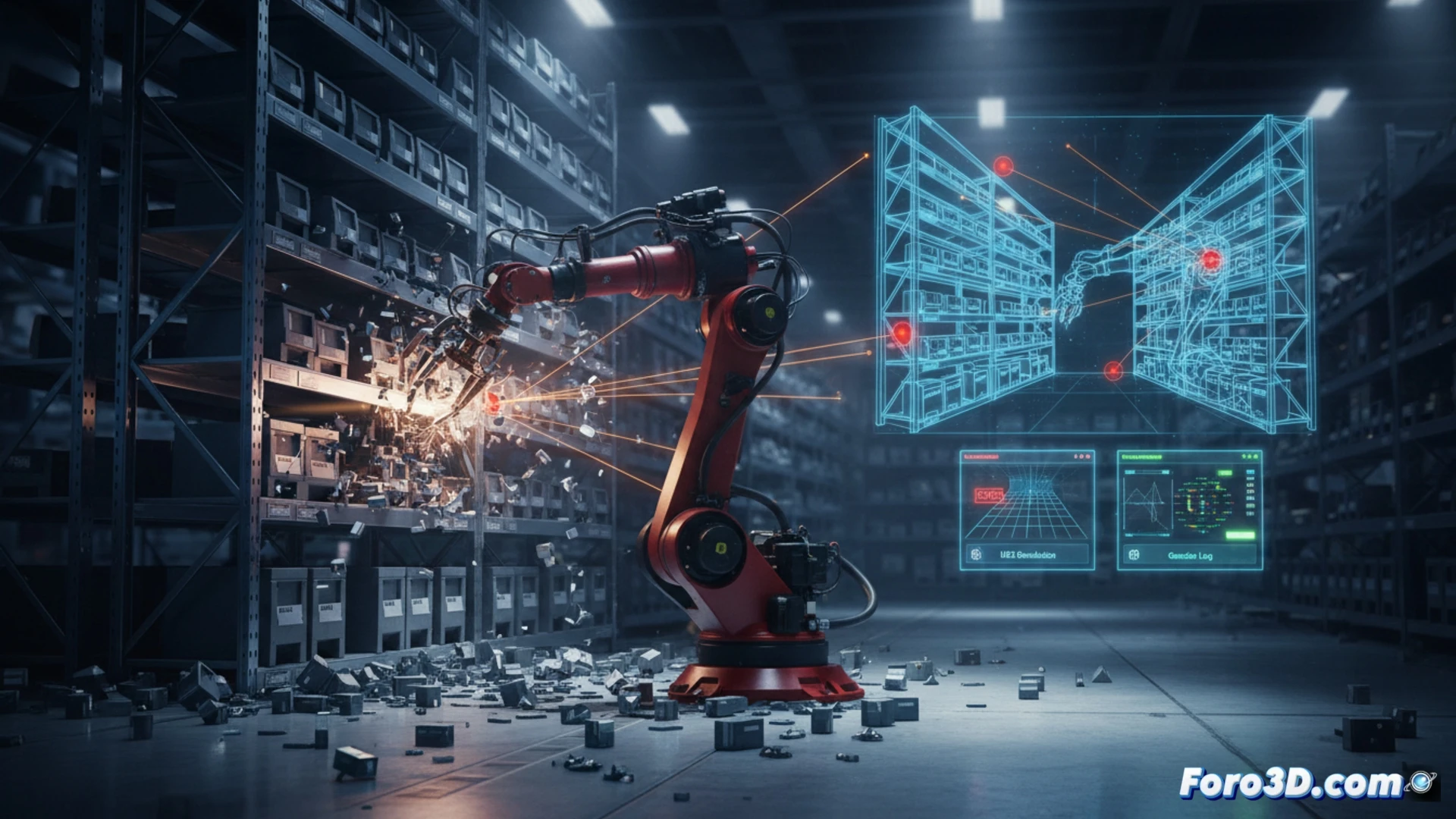
고밀도 창고에서 피킹 로봇이 선반과 충돌하여 도미노 효과로 여러 열의 화물이 무너졌습니다. LIDAR 센서가 장애물 근접을 올바르게 감지했다면 이 사고는 피할 수 있었을 것입니다. 사고 원인을 파악하기 위해 디지털 트윈을 통해 사고를 재현했으며, FARO Scene으로 스캔한 실제 데이터를 Gazebo 시뮬레이션 및 Unreal Engine 5 시각화와 대조했습니다. 목표는 복도 금속 표면의 정반사로 인해 발생한 사각지대를 찾는 것이었습니다.
FARO Scene을 활용한 포렌식 재구성 및 Gazebo 검증 🛠️
첫 번째 단계는 FARO Scene을 사용하여 사고 후 창고의 형상을 캡처하고 고정밀 포인트 클라우드를 생성하는 것이었습니다. 이 포인트 클라우드는 Navisworks로 가져와 구조 붕괴 순서를 분석했습니다. 이후 Gazebo에서 로봇과 선반의 디지털 트윈을 구축하여 원래 피킹 경로를 복제했습니다. 이 가상 환경에서 LIDAR 경로를 시뮬레이션한 결과, 레이저 빔이 연마된 강철 패널에 얕은 각도로 입사되어 센서가 빈 공간으로 해석하는 반사를 생성하는 영역이 확인되었습니다. 실제 포인트 클라우드와 시뮬레이션을 직접 비교한 결과, 이러한 사각지대가 충돌 위치와 정확히 일치하는 것으로 확인되었습니다.
안전 재고: 물리적 레이아웃에서 몰입형 시뮬레이션으로 🚧
이 사고는 가상 환경을 검증하지 않고 LIDAR 센서에만 의존하는 것이 위험할 수 있음을 보여줍니다. 금속의 정반사는 고밀도 창고에서 중요한 사각지대입니다. 개선 방안으로 선반 모서리에 확산 마크를 추가하고 LIDAR 지지대를 재배치하여 문제가 되는 각도를 커버하는 레이아웃 재설계가 제안됩니다. Unreal Engine 5는 이러한 수정 사항을 실시간으로 시각화하여 안전 엔지니어에게 물리적으로 구현하기 전에 구성을 테스트할 수 있는 몰입형 도구를 제공함으로써 새로운 도미노 효과의 위험을 줄입니다.
Unreal Engine 5의 디지털 트윈에서 피킹 로봇 충돌을 예측하지 못한 매개변수는 무엇이며, 고밀도 창고에서 도미노 효과를 어떻게 방지할 수 있었을까요?
(추신: Foro3D에서는 컴퓨터가 한계에 도달할 때까지 폴리곤을 최적화하듯 경로를 최적화합니다)