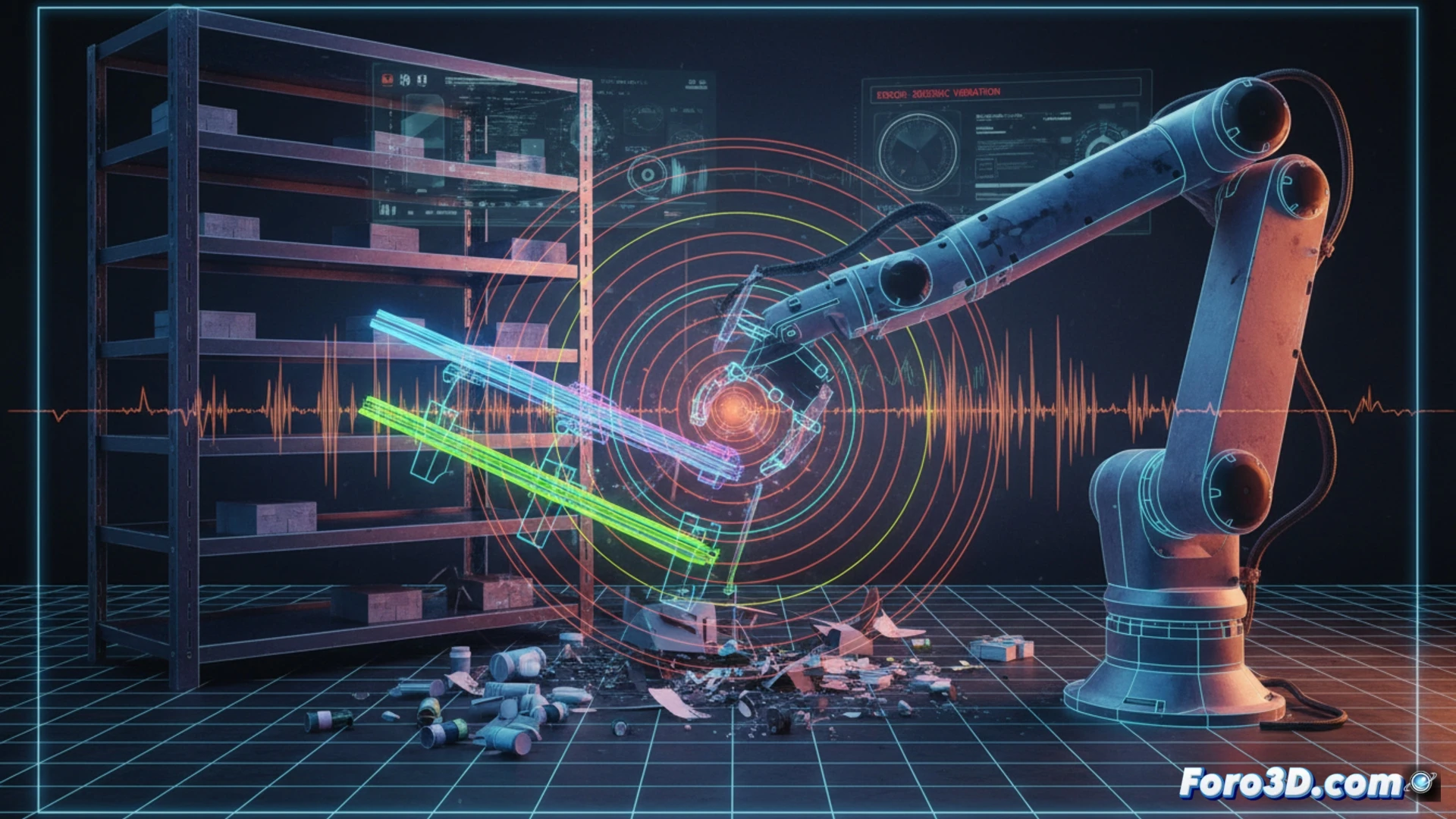
이 사건은 고속 로봇 약국에서 발생했습니다. 로봇 팔이 수직 보관 시스템의 선반과 격렬하게 충돌한 것입니다. 언뜻 보기에는 프로그래밍 오류처럼 보였지만, 유지보수 팀은 외부 요인을 의심했습니다. 3D 분석 결과, 건물의 표준 센서로 감지되지 않은 지진 진동으로 인해 가이드 레일에 밀리미터 단위의 변형이 발생한 것으로 드러났습니다.
RoboGuide, RealWorks 및 CloudCompare를 사용한 검사 방법론 🤖
진단은 RoboGuide에서 시작되어 로봇 팔의 원래 궤적을 시뮬레이션했습니다. PLC의 원격 측정 데이터와 비교한 결과 Z축에서 2.3mm의 편차가 감지되었습니다. 원인을 확인하기 위해 Trimble 레이저 스캐너로 레일을 스캔하고 포인트 클라우드를 Trimble RealWorks에서 처리했습니다. 표면 정렬 결과 왼쪽 레일에 볼록한 부분이 나타났습니다. CloudCompare를 사용하여 현재 상태와 원본 CAD 설계 간의 거리 비교(M3C2)를 수행하여 충격 영역에서 최대 1.8mm의 변형을 계산했습니다. Blender는 지진 진동 순간과 엔드 이펙터의 궤적을 연관시키는 포렌식 애니메이션을 생성하는 데 사용되었습니다.
자동화 시스템 교정을 위한 교훈 ⚙️
이 사례는 약국 로봇 시스템이 로봇 내부 센서를 넘어선 구조적 모니터링을 필요로 함을 보여줍니다. 저진폭 지진 진동은 건물에 손상을 주지 않더라도 정밀 레일의 교정을 흐트러뜨릴 수 있습니다. 선반 바닥에 가속도계를 통합하고 CloudCompare로 정기적인 3D 스캔을 수행하여 충돌이 발생하기 전에 서브밀리미터 변형을 감지하는 것이 좋습니다. 수정 작업에는 레일 앵커 재조정과 RoboGuide에서 새로운 오류 보정 맵으로 로봇 팔 재교정이 포함되었습니다.
초기에 로봇 약국 환경에서 모델링되지 않은 지진 진동에 직면했을 때 제약 로봇 팔의 궤적을 예측하기 위한 충돌 3D 분석 모델의 신뢰성은 어느 정도입니까?
(추신: 로봇을 시뮬레이션하는 것은 재미있습니다. 명령을 따르지 않기로 결정할 때까지는요.)