Vision-Language-Action (VLA) 모델은 언어 지시와 시각 인식을 통합하여 동작을 생성함으로써 로봇 조작의 핵심 발전을 나타냅니다. 그러나 그 언어 코어는 일반적으로 블랙박스처럼 작동하여 시각 정보가 어떻게 기반을 이루는지 이해를 제한합니다. 최근 분석에 따르면 동작 생성 중 깊은 층에서 시각 토큰에 대한 민감도가 감소하는 것으로 나타났으며, 이는 정밀 작업에 치명적인 문제입니다. 여기서 3D 시뮬레이션이 필수적이며, 물리적 배포 전에 복잡한 가상 환경에서 이러한 모델을 훈련하고 진단할 수 있게 합니다. 🤖
VL-MoT 아키텍처와 동작 지도형 시각 가지치기 🔍
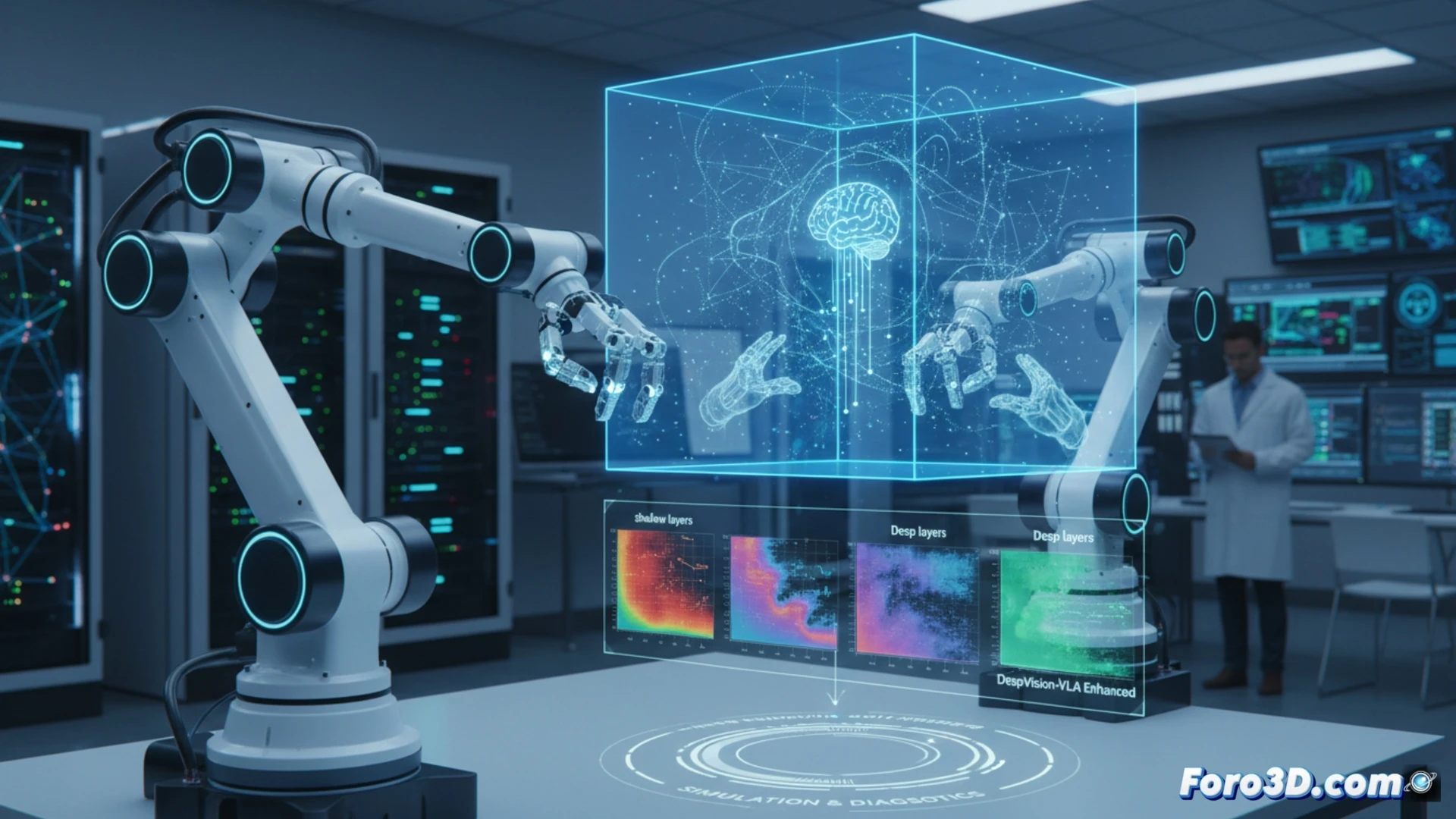
이 한계를 해결하기 위해 DeepVision-VLA가 제안되며, 이는 Vision-Language Mixture-of-Transformers (VL-MoT) 프레임워크를 기반으로 합니다. 이 아키텍처는 전문 비전 모델과 VLA 코어 간 공유 주의를 허용하며, 모델의 가장 깊은 층에 다단계 시각 특징을 주입하여 복잡한 조작을 위한 시각 표현을 강화합니다. 병렬로 Action-Guided Visual Pruning (AGVP)이 도입되며, 이는 표면 층의 주의를 사용하여 관련 없는 시각 토큰을 가지치고 작업에 핵심적인 토큰만 보존하며 최소한의 계산 오버헤드를 가집니다. 현실적인 3D 시뮬레이션에서 검증된 이 접근법은 시뮬레이션 환경에서 9.0%의 개선을 달성합니다.
로보틱스의 미래는 3D 시뮬레이션을 거칩니다 🚀
실제 세계에서 7.5% 더 높은 효율성을 보인 DeepVision-VLA의 성공은 3D 시뮬레이션이 테스트베드로써의 근본적인 역할을 강조합니다. 이러한 가상 환경은 다양한 합성 데이터를 생성하고, 실패 시나리오를 테스트하며 위험 없이 비전-동작 통합을 세밀하게 조정할 수 있게 합니다. 로보틱스 및 자동화 분야에서 이는 비구조화된 환경에서 객체를 조작할 수 있는 로봇 개발을 가속화하며, 먼저 3D에서 훈련된 견고하고 깊은 시각 이해가 자율성의 열쇠입니다.
Vision-Language-Action (VLA) 모델인 DeepVision과 같은 모델이 비구조화된 환경에서의 로봇 조작 작업에서 일반화 도전을 어떻게 극복하고 있습니까?
(PD: 로봇 시뮬레이션은 재미있지만, 당신의 명령을 따르지 않기로 결정할 때까지는요.)