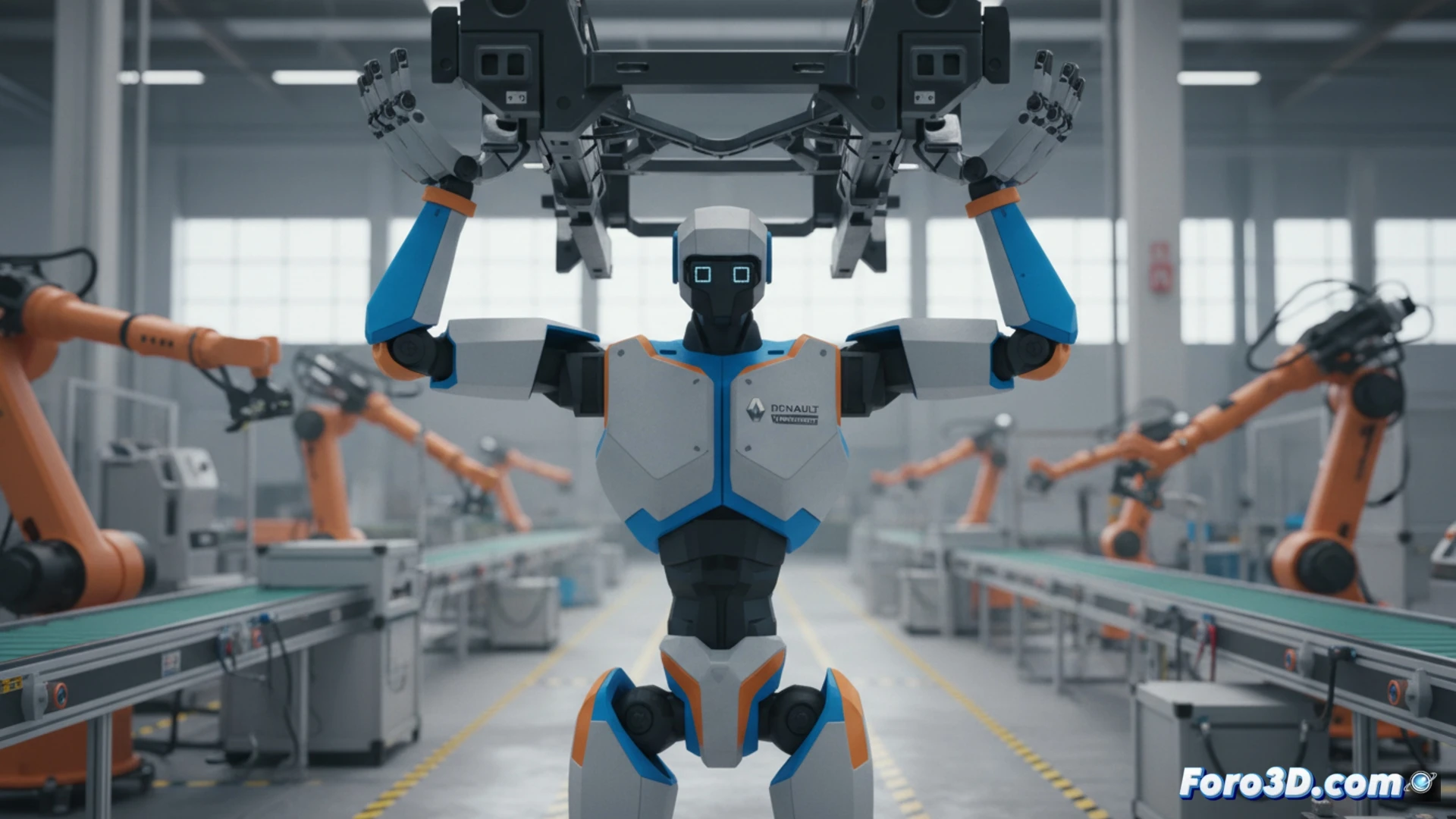
르노는 Wandercraft와 협력하여 Calvin-40을 선보였습니다. 이 로봇은 현실주의 추세를 깨는 산업용 휴머노이드 로봇으로, Playmobil을 연상시키는 간소화된 기하학적 디자인을 가지고 있습니다. 이 로봇은 비용 효율성과 빠른 개발을 우선시합니다. 그 임무는 무거운 장비 운송과 같은 반복적이고 비인간적인 작업을 맡아 생산을 가속화하고 부상을 줄이는 것입니다. 이러한 선택은 단순성과 일정 최적화에 기반한 산업 전략을 반영합니다.
3D 모델링과 시뮬레이션: 민첩한 개발과 기능성의 핵심 🤖
Calvin-40의 40일 만의 개발은 고급 3D 모델링 및 시뮬레이션 도구 없이는 불가능했을 것입니다. Wandercraft의 외골격 기술에서 영감을 받은 구조는 미학보다 기계적 기능성을 우선하는 정밀한 디지털 설계를 요구합니다. 시뮬레이션을 통해 움직임, 무게 적재 시 균형, 기존 제조 환경과의 안전한 통합을 검증합니다. 또한, 음성 제어 인터페이스라는 중요한 소프트웨어 계층도 물리적 구현 전에 가상 환경에서 모델링하고 테스트하여 인간 작업자와의 신뢰할 수 있는 상호작용을 보장합니다.
산업 자동화에서의 기하학적 단순성의 장점 ⚙️
Calvin-40의 접근 방식은 로봇 시뮬레이션 분야에 흥미로운 성찰을 제시합니다. 단순화된 기하학을 가진 3D 모델은 제한이 아니라 전략적 이점입니다. 시뮬레이션의 계산 복잡성을 줄이고, 시행착오 주기를 가속화하며, 디지털 개발과 물리적 제조 모두를 저렴하게 만듭니다. 이 사례는 특정 산업 환경에서 효율적인 3D 모델 기반 최적화가 인간형 모방보다 더 가치 있을 수 있음을 보여주며, 접근 가능한 자동화로 가는 대안 경로를 제시합니다.
저비용 디자인과 산업 중심 접근으로 Calvin-40이 물류 작업 자동화에서 휴머노이드 로봇 사용을 대중화할 수 있을까요?
(PD: 로봇 시뮬레이션은 재미있지만, 당신의 명령을 따르지 않기로 결정할 때까지는요.)