최근 로봇 랙 시스템의 고장으로 인해 물류 및 산업 생산 엔지니어들이 경계 태세에 돌입했습니다. 자동화된 구조물이 작동 중 붕괴된 이 사고는 공급망을 마비시켰을 뿐만 아니라 기계 설계에 숨겨진 취약점을 드러냈습니다. 근본 원인을 파악하기 위해 우리는 3D 시뮬레이션과 디지털 트윈을 활용했으며, 이러한 도구를 통해 사건을 밀리미터 단위로 재현하고 각 구성 요소의 응력 분포를 시각화할 수 있었습니다.
붕괴 모델링 및 구조적 응력 분석 🏗️
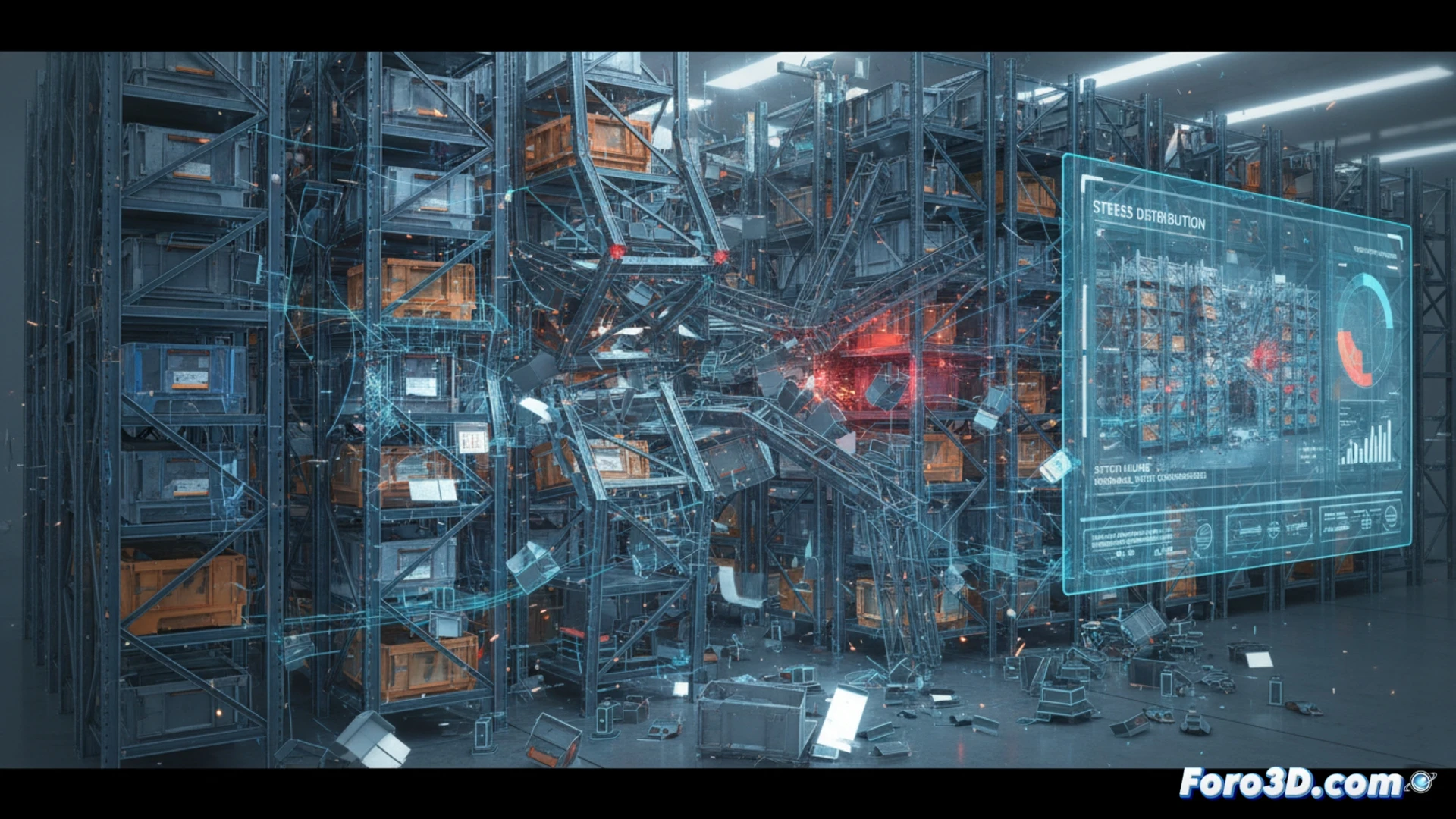
유한 요소 해석(FEA) 소프트웨어와 파라메트릭 모델링을 통해 레일, 지지대 및 앵커 지점을 포함한 로봇 랙의 정확한 형상을 재구성했습니다. 동적 시뮬레이션은 붕괴 순서를 재현했습니다. 먼저 베이스 연결부에서 점진적인 변형이 발생했고, 그 다음 중앙 종방향 부재에서 취성 파괴가 일어났습니다. 열 지도는 최대 응력이 강철의 항복 강도를 40% 초과했으며, 가이드 레일과 수직 프로파일 간의 연결 지점에 집중되었음을 보여주었습니다. 이는 반복적인 하중 사이클로 인해 악화된 재료 피로가 주요 원인이었음을 시사합니다.
디지털 트윈을 활용한 예측 유지보수를 위한 교훈 🔧
이 사례는 3D 시뮬레이션이 설계뿐만 아니라 고장이 발생하기 전에 예측하는 데에도 사용될 수 있음을 입증합니다. IoT 센서 데이터를 디지털 트윈에 통합함으로써 각 선반의 변형을 실시간으로 모니터링하고 하중 사이클을 조정할 수 있습니다. 기술적 제안은 명확합니다. 가상 모델에서 정기적인 피로 시뮬레이션을 수행하여 계산 시간 내에 10년간의 운영을 에뮬레이션하는 것입니다. 이를 통해 중요 지점을 식별하고 사전 예방적 유지보수를 계획하여 붕괴를 방지하고 로봇 시스템의 수명을 최적화할 수 있습니다.
산업용 로봇 랙의 붕괴를 정확하게 예측하기 위해 3D 시뮬레이션에 포함되어야 하는 중요한 하중 및 구조적 피로 매개변수는 무엇입니까?
(추신: Foro3D에서는 컴퓨터가 한계에 도달할 때까지 폴리곤을 최적화하듯 경로를 최적화합니다.)