최근 로봇 약국에서 발생한 막힘 사고는 단순한 기술적 일화가 아니라 산업 물류의 완벽한 사례 연구입니다. 이 글에서는 3D 시각화를 통해 자동화 창고에서 최종 조제기까지 이어지는 의약품 흐름의 정확한 막힘 지점을 식별하고, 시스템 최적화를 위한 로드맵을 제시하는 방법을 분석합니다.
물류 흐름 매핑 및 막힘 지점 🚧
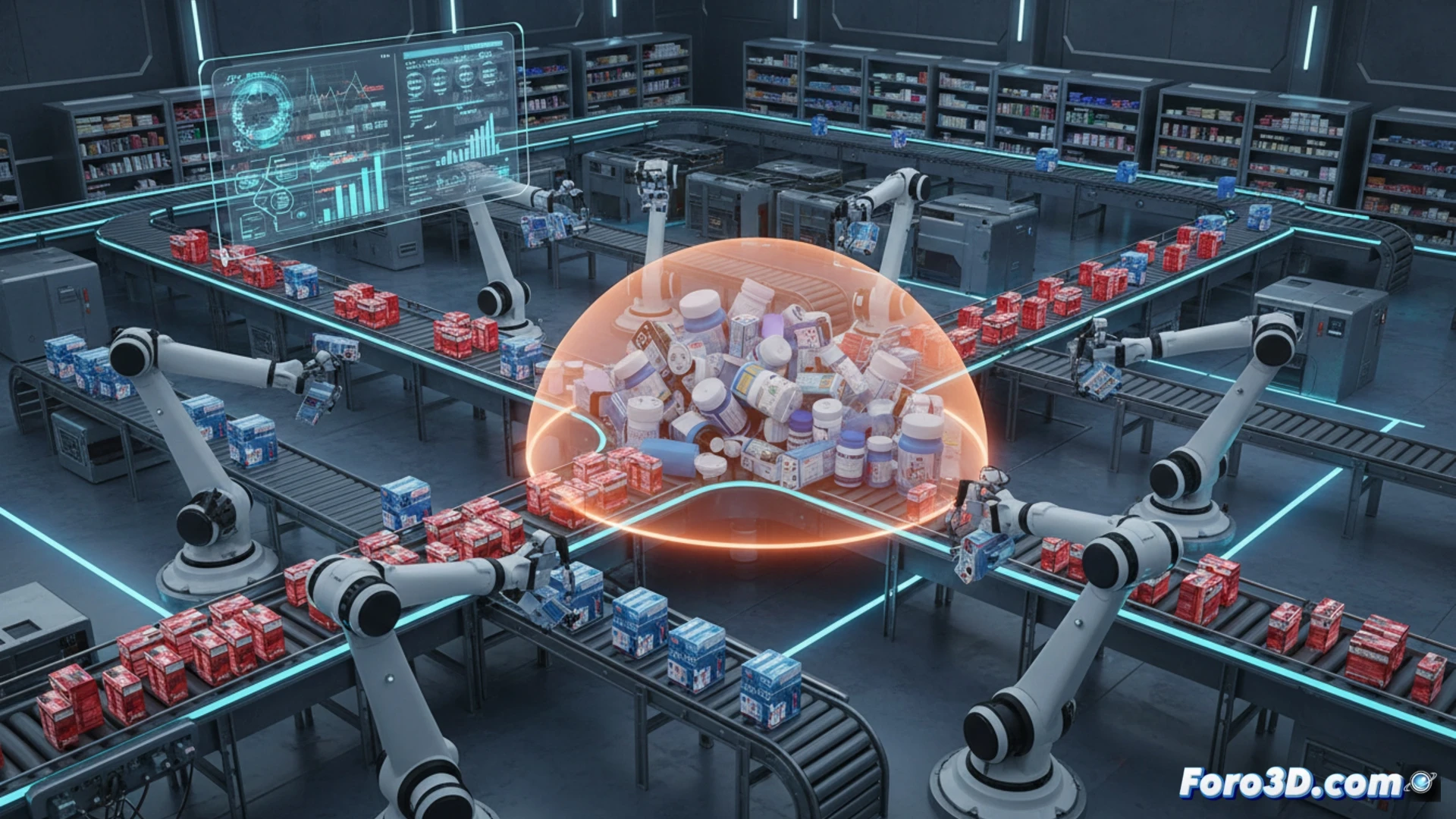
막힘을 이해하려면 제품 이동 경로를 3D로 모델링해야 합니다. 프로세스는 로봇 선반에서 시작되며, 공압 암이 블리스터 팩을 꺼냅니다. 이 팩은 가변 속도 컨베이어 벨트로 이동하여 분류 호퍼로 보내집니다. 중요한 지점은 일반적으로 컨베이어 벨트와 호퍼의 교차점에 위치하며, 포장재의 형상이나 먼지 축적으로 인해 과도한 마찰이 발생합니다. 개별 요소법(DEM) 시뮬레이션을 통해 단위의 축적을 시각화하고 흐름 붕괴의 정확한 순간을 예측할 수 있습니다.
가동 중단 방지를 위한 예측 재설계 🔧
해결책은 단순히 센서를 청소하는 것이 아니라 병목 지점을 재설계하는 것입니다. 호퍼의 경사와 컨베이어 벨트 표면 질감을 3D로 시뮬레이션한 결과, 35도 각도와 논스틱 코팅을 적용하면 막힘이 80% 감소하는 것을 발견했습니다. 약국의 디지털 트윈을 기반으로 한 이 접근 방식은 실제 공급망 중단이 발생하기 전에 예측 유지보수를 수행하고 로봇 암 매개변수를 조정할 수 있게 해줍니다.
로봇 약국의 3D 막힘 시뮬레이션이 높은 재고 회전율을 가진 산업 물류의 병목 현상을 예측하고 해결할 수 있을까요?
(참고: 산업 공장을 시뮬레이션하는 것은 사다리를 제거한 수영장 없는 심즈 게임과 같습니다)