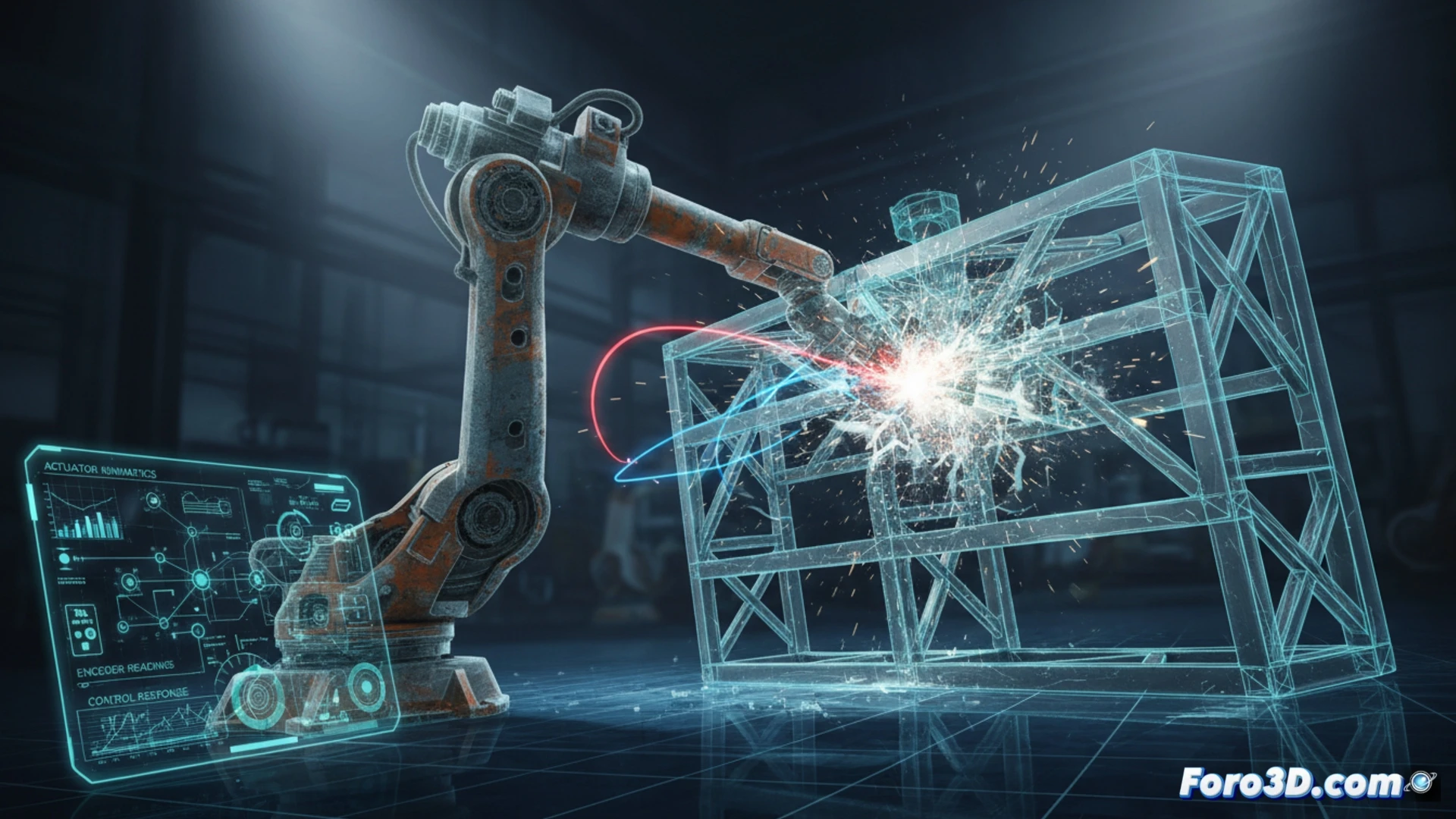
로봇 페인터 오류로 알려진 이 사건은 산업 안전 분야에서 기술적 논쟁을 불러일으켰습니다. 자동차 부품에 코팅을 적용하도록 프로그래밍된 로봇 팔이 갑자기 궤도를 이탈하여 금속 구조물에 충돌했습니다. 이 사례는 포렌식 파이프라인에 대한 완벽한 연구 대상이 되며, 현장의 3D 재구성을 통해 액추에이터의 운동학, 엔코더 판독값 및 제어 시스템 응답과 같은 변수를 분리할 수 있습니다.
궤적 시뮬레이션 및 기계적 고장 분석 🔧
조사를 수행하기 위해 LiDAR 스캐너로 캡처한 포인트 클라우드를 사용하여 환경의 디지털 모델이 생성됩니다. 충격 전 이동 로그를 기반으로 한 로봇 팔의 동적 시뮬레이션은 손목 회전축의 이상 징후를 드러냅니다. 3D 포렌식 분석을 통해 각속도가 안전 임계값을 초과한 정확한 순간을 분리할 수 있으며, 이는 하모닉 감속기의 고장 또는 리졸버 신호 손상을 시사합니다. 이 접근 방식은 인적 오류를 배제하고 원인을 기계적 구성 요소의 조기 마모에 집중시킵니다.
자동화 환경 예방을 위한 교훈 🛡️
포렌식 애니메이션을 통한 사고 시각화는 파손 지점을 식별할 뿐만 아니라 예측 유지보수를 위한 검토 프로토콜을 수립합니다. 진동 센서 통합 및 역운동학의 실시간 모니터링은 유사한 편차를 예측할 수 있습니다. 이 사례는 사고의 3D 문서화가 안전 공학에 필수적인 도구임을 입증하며, 단일 오류를 로봇 산업 전체에 적용 가능한 교훈으로 전환합니다.
산업용 로봇 페인터 오류의 3D 재구성에서 궤적 계획의 알고리즘 오류와 모델링되지 않은 물리적 편차를 구분할 수 있게 해주는 포렌식 파이프라인 방법론은 무엇입니까?
(추신: 포렌식 파이프라인에서 가장 중요한 것은 증거와 참조 모델을 혼동하지 않는 것입니다... 그렇지 않으면 현장에 유령이 나타날 수 있습니다.)