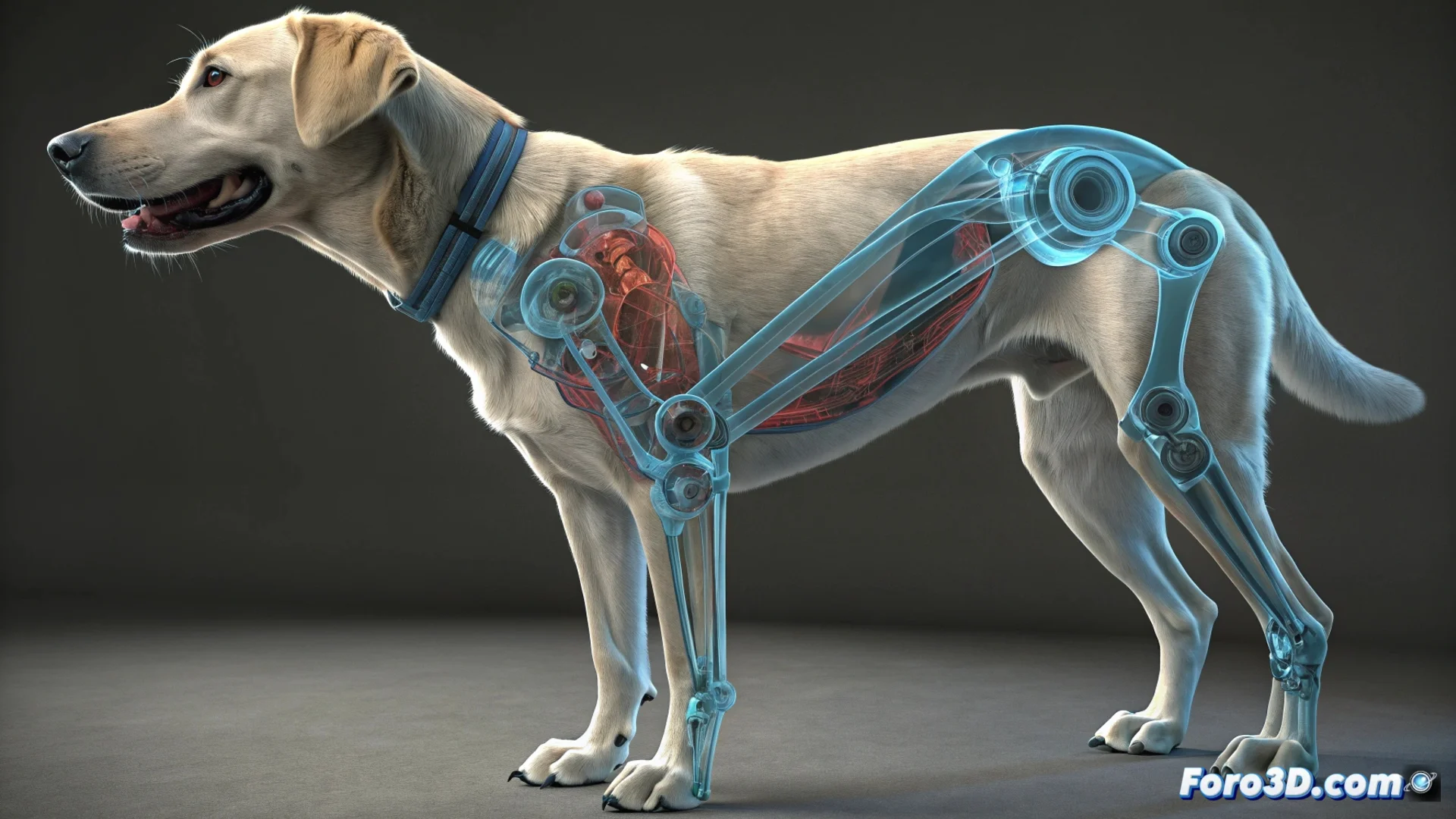
로보틱스는 자연 해부학으로부터 배우며 발전한다
현재 4족 로봇들은 놀라운 민첩성을 보여주지만, 그 기술적 기반은 자연이 완벽하게 다듬은 시스템과 근본적으로 다릅니다. 로봇 공학은 질적 도약을 위해 생체역학 원리를 세밀하게 관찰하기 시작했습니다. 🔬
회전 액추에이터의 지배
산업은 거의 완전히 전기 모터에 의존하여 움직임을 생성합니다. 이러한 구성 요소는 높은 정밀도를 제공하며 고급 소프트웨어를 통해 상대적으로 쉽게 제어할 수 있습니다. 로봇 플랫폼이 센서 데이터를 처리하고, 궤적을 계산하며, 복잡한 표면에서 실시간으로 동적 안정성을 유지할 수 있게 합니다.
전기 모터의 주요 장점:- 컴팩트한 패키지에서 높은 정밀도와 출력.
- 제어 전자 시스템과의 쉬운 통합.
- 복잡하고 조화된 움직임을 반복적으로 실행할 수 있는 능력.
“때때로 앞으로 나아가기 위해 공학은 뒤를 돌아봐야 합니다. 로봇 이동의 미래는 고양이가 어떻게 움직이는지를 재발견하는 데 있을 수 있습니다.”
수백만 년 진화의 교훈
자연 해부학은 모터를 사용하지 않고 수축하는 근육 섬유 시스템을 사용합니다. 이 접근 방식은 에너지를 더 적응적으로 소비하며 충격에서 더 잘 회복됩니다. 근육과 힘줄은 동시에 액추에이터, 완충기, 스프링으로 작용하여 탄성 에너지를 매우 효율적으로 저장하고 방출합니다.
생체역학 모방의 이점:- 더 가볍고 지각적으로 더 자연스러운 움직임의 로봇.
- 운영 소음의 상당한 감소.
- 탄성 에너지를 활용하여 배터리 소비 감소.
더 유능한 로봇으로 가는 길
생체역학 원리를 로보틱스에 통합하는 것은 전자 장치를 포기하는 것을 의미하는 것이 아니라 보완하는 것입니다. 목표는 근육 조직의 다재다능함과 탄력성을 포착하는 하이브리드 시스템 또는 새로운 액추에이터를 개발하는 것입니다. 이 생체모방 접근 방식은 단순히 이동할 뿐만 아니라 환경과 훨씬 우수하고 효율적인 방식으로 상호작용하는 기계를 약속합니다. 🚀