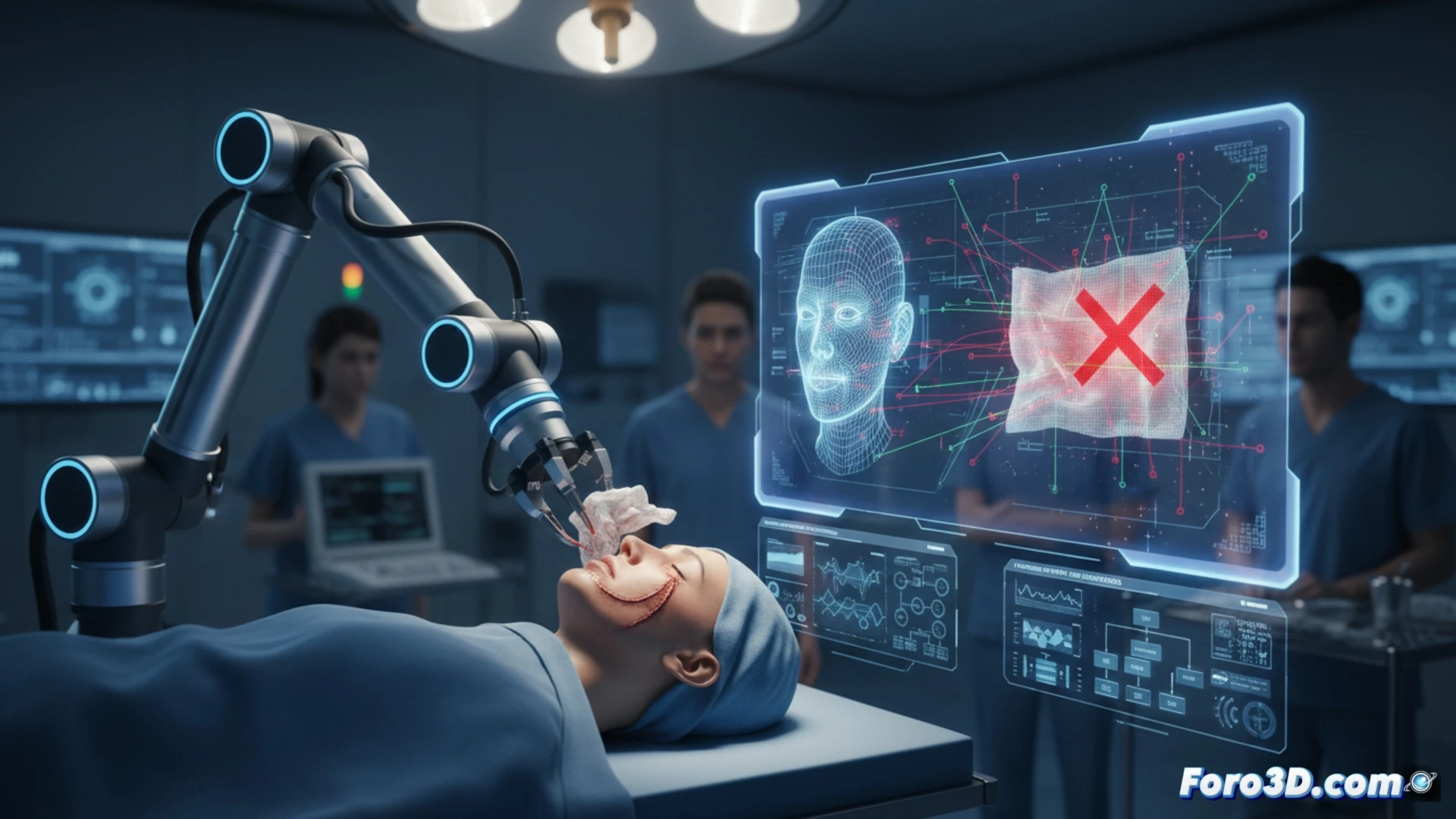
皮膚科処置の補助用に設計された協働ロボットが、患者に意図しない深い切開を行った。このインシデントのフォレンジック分析では、力覚センサーの3D再構築と患者の点群マッピングにより、重大な異常が明らかになった。コボットが手術用ガーゼを皮膚表面と誤認したのである。この事例は、医療環境における触覚認識のリスクを浮き彫りにしている。
エラー再現:デジタルツインと点群 🛠️
運動学シミュレーションにはRoboGuide、デジタルツインにはUnreal Engine 5を用いて、手術シナリオを再現した。デジタルツインにトルクセンサーデータを統合することで、計画された軌道からの逸脱を可視化できた。インシデント後の点群をCloudCompareで分析したところ、患者の表面に不連続性が認められた。アルゴリズムによる比較の結果、ロボットのデータベースに軟組織として保存されていたガーゼの機械的インピーダンスが、接触の誤った読み取りを生成し、切開動作を引き起こしたことが明らかになった。
感覚障害に対する盾としての3Dシミュレーション 🛡️
このインシデントは、3Dシミュレーションが単なる設計ツールではなく、重要な安全監査役であることを示している。デジタルツイン内でリアルタイムの点群データを統合することで、材料(ガーゼ vs. 表皮)の混同を特定することができた。手術自動化において、課題はアームの精度だけでなく、非剛体オブジェクトを識別する認識アルゴリズムの能力である。教訓は明らかだ。コボットに自身の触覚を疑うことを訓練しなければならない。
コボット業界は、美容外科のような精密医療用途で安全性を損なう触覚障害を防ぐために、冗長な触覚フィードバックシステムをどのように統合できるだろうか?
(追記:ロボットをシミュレートするのは楽しい。命令に従わなくなるまでは。)