高精度肝生検用に設計された自律型手術ロボットが、処置中に血管裂傷を引き起こした。当初はソフトウェアのエラーに起因するとされたこのインシデントは、3D法医学鑑定の対象となった。調査では、Ansysによる有限要素シミュレーションと針のメトリックスキャンを組み合わせ、故障の力学を再構築。根本原因はアルゴリズム上のものではなく、機械的かつ組織的なものであることが実証された。
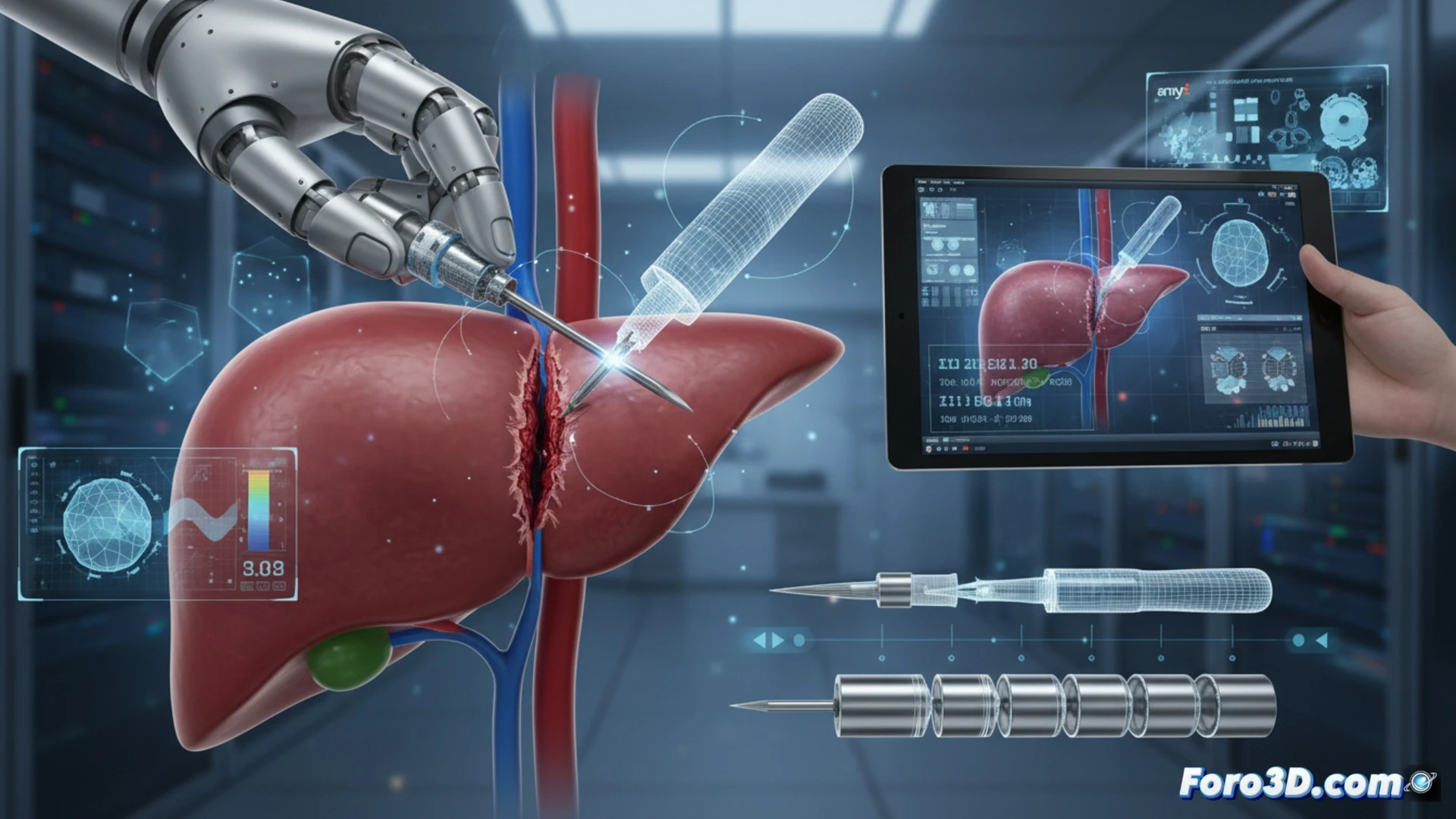
有限要素シミュレーションと針のスキャン 🧬
法医学チームは、3Dスキャンにより針の正確な形状をデジタル化し、Ansysの有限要素モデルに統合した。方向によって剛性が異なるコラーゲン線維によって特徴づけられる、肝実質の異方性が再現された。シミュレーションにより、線維化密度の高い肝葉を貫通する際、針先に非対称な曲げモーメントが生じることが示された。ロボットの剛性ガイダンスアルゴリズムでは考慮されていなかったこのトルクにより、軌道が4.2ミリメートル逸脱し、隣接する門脈を切断するに至った。
自律型手術ロボットへの教訓 🤖
この鑑定は、現在の制御モデルが生体組織の生体力学的相互作用を過小評価していることを明らかにしている。将来の医原性障害を防ぐためには、自律型ナビゲーションアルゴリズムに、術前エラストグラフィーやリアルタイムシミュレーションによって得られた組織異方性データを組み込む必要がある。Materialise Mimicsで生成されるような肝臓のデジタルツインを統合することで、挿入力と角度を動的に調整し、モデルの理論的剛性と臓器の実際の複雑さとの間のギャップを埋めることが可能となる。
この肝臓針の故障に関する3D鑑定から、将来の血管裂傷を防ぐために、自律型手術ロボットにおけるフィードバックセンサーの設計についてどのような教訓が得られるか。
(追記:もし臓器の3Dプリントモデルが拍動しないなら、小さなモーターを付ければいいんですよ…冗談です!)