テスラの新型人型ロボット「Optimus Gen 2」は、単なる機械工学の成果ではありません。それは3Dシミュレーションソフトウェアの勝利です。63kgの機械が流暢に歩き、卵を割らずに操作することを実現するために、テスラは各関節と各センサーを仮想環境で再現する必要がありました。このデジタルツインは、試行錯誤を通じてロボットAIを訓練し、物理モデルが実際のコンポーネントを危険にさらすことなく、洗練された動作を受け継ぐことを可能にします。
生体力学モデリングと触覚センサーシミュレーション 🤖
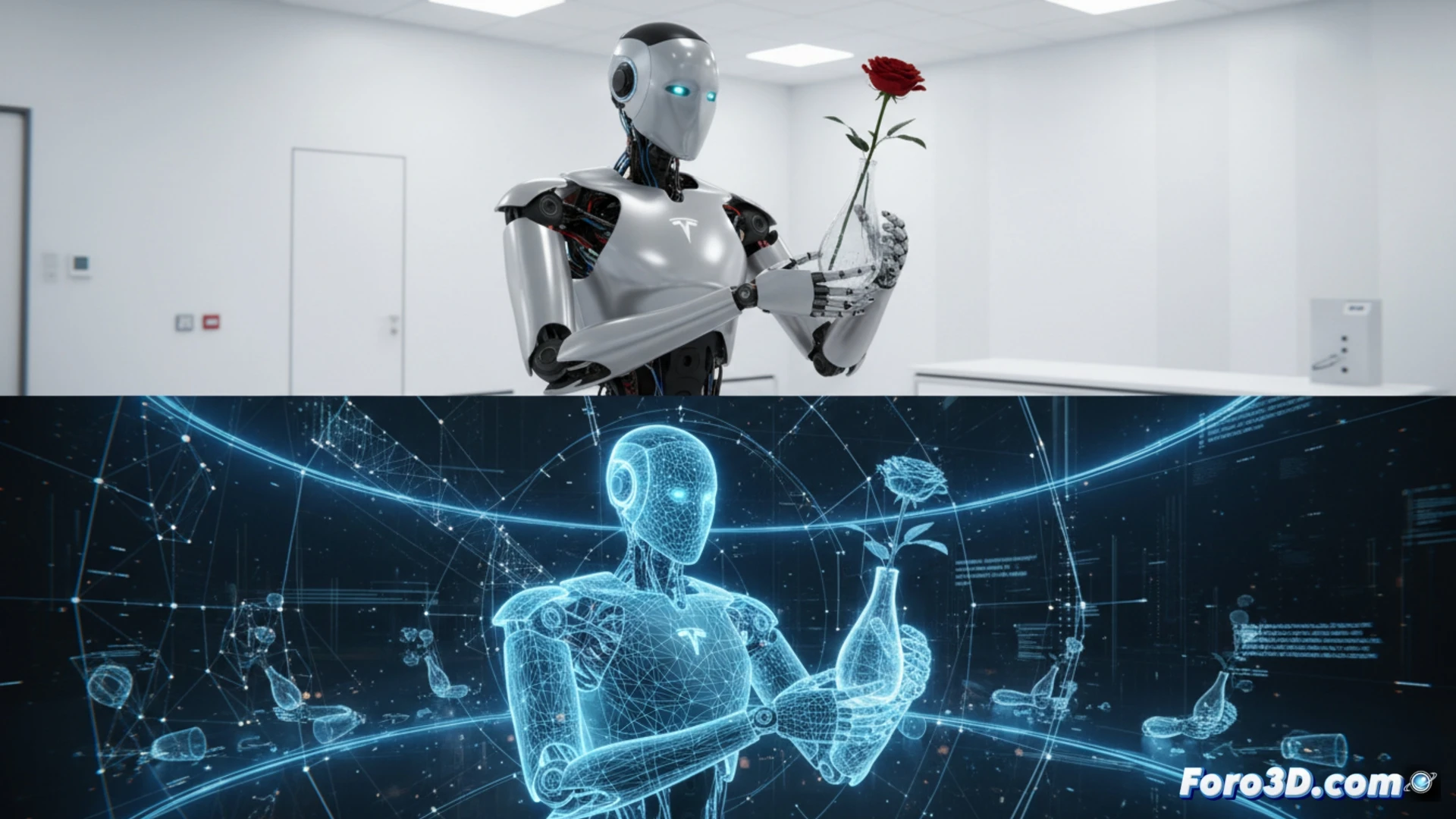
Gen 2の質的飛躍は、その生体力学的制御にあります。これを達成するために、エンジニアはロボットの重心と各セグメントの慣性を再現する3Dモデルを構築します。このモデル上で、平衡軌道を予測するための逆物理シミュレーションが実行されます。鍵となるのは仮想触覚センサーです。3D環境では、物体を押したときのパッドの変形がシミュレートされます。AIはこれらの合成データを読み取り、把持力を調整することを学習し、デジタル信号を人間に近い感触に変換します。
自律性への近道としての3D可視化 🚀
3D可視化による検証により、テスラは物理的なプロトタイプよりも迅速に反復することができます。レンダリングされた環境で転倒や姿勢補正をシミュレートすることで、制御ソフトウェアは機械的な摩耗なしに成熟します。これにより開発が加速されるだけでなく、自動化の概念そのものが再定義されます。ロボットはもはや rigid な実行装置ではなく、3D空間における自身の身体を理解するシステムとなります。次のステップは、Optimusが実際に最初の一歩を踏み出す前に、デジタルツインが工場全体を自律的にナビゲートする方法を学習することです。
デジタルツインの使用により、Optimus Gen 2がどのようにして壊れやすい物体を傷つけずに精密なタスクを実行できるのか、そしてこのシミュレーションが従来のロボット訓練方法と比較してどのような利点を提供するのでしょうか?
(追記:ロボットのシミュレーションは楽しいですが、彼らがあなたの命令に従わないと決めた時は別です。)