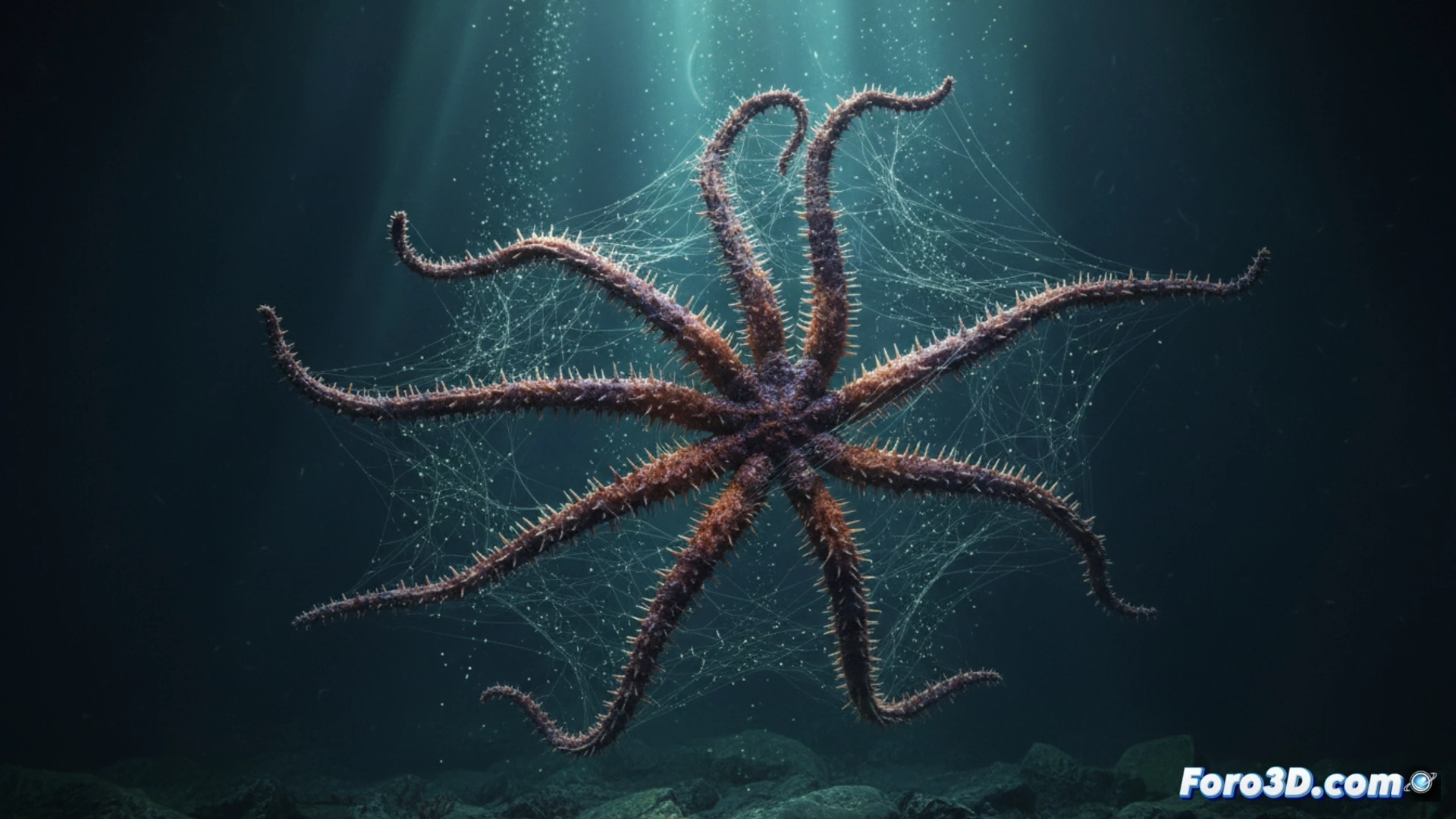
ナスカ海溝の深海で発見されたブリシンガ科のヒトデは、沿岸に生息する近縁種とは根本的に異なる形態を示します。極端に長く、石灰質の棘で覆われた腕により、海底から浮上して浮遊粒子を捕捉することができます。本稿では、この生物をデジタル的に再現するための科学的可視化プロセスを探求し、その付属肢の形状が垂直な海流における濾過摂食戦略にどのように応答しているかを分析します。
水深データに基づく形態復元 🌊
ブリシンガ科のヒトデを3Dモデリングするための最初のステップは、保存標本のフォトグラメトリック参照を取得することです。ベースメッシュは、中央の円盤と放射状の長さ(成体では40センチメートルを超えることもある)の関係を優先する必要があります。腕には、側棘(pedicellariaと呼ばれる)に細分化された特定のトポロジーが必要です。外骨格の粗さマップに基づくディスプレイスメントモディファイアを適用することで、突起部にテクスチャを施すことができます。最大の技術的課題は腕の無重力状態をシミュレートすることです。これは、自然の生息地では、水管系の静水圧によって腕が硬く保たれているためです。濾過のアニメーションには、腕の表面を移動するパーティクルシステムを実装し、プランクトンを中央の口へと導く繊毛運動を再現します。
発見のツールとしての可視化 🔬
美的リアリズムを超えて、ブリシンガ科のヒトデの3Dモデルは、海洋生物学者が水深4,000メートルの現場では観測不可能な流れのダイナミクスをシミュレートすることを可能にします。腕の断面をレンダリングすることで、複雑な歩帯溝の構造を可視化します。このアプローチは、ナスカ海溝の生物多様性について一般の人々を教育するだけでなく、低照度・高圧環境における放射相称の進化に関する仮説を立てるためのプラットフォームも提供します。
ブリシンガ科のヒトデの棘のある腕とナスカ海溝の深海流との間の流体構造連成をCFDシミュレーションする際に、視覚的に正確で科学的に有効な3Dモデルを実現するための具体的な技術的課題は何ですか?
(追記:海洋をシミュレートするための流体物理は、海そのもののようなものです。予測不可能で、いつもRAMが不足します。)