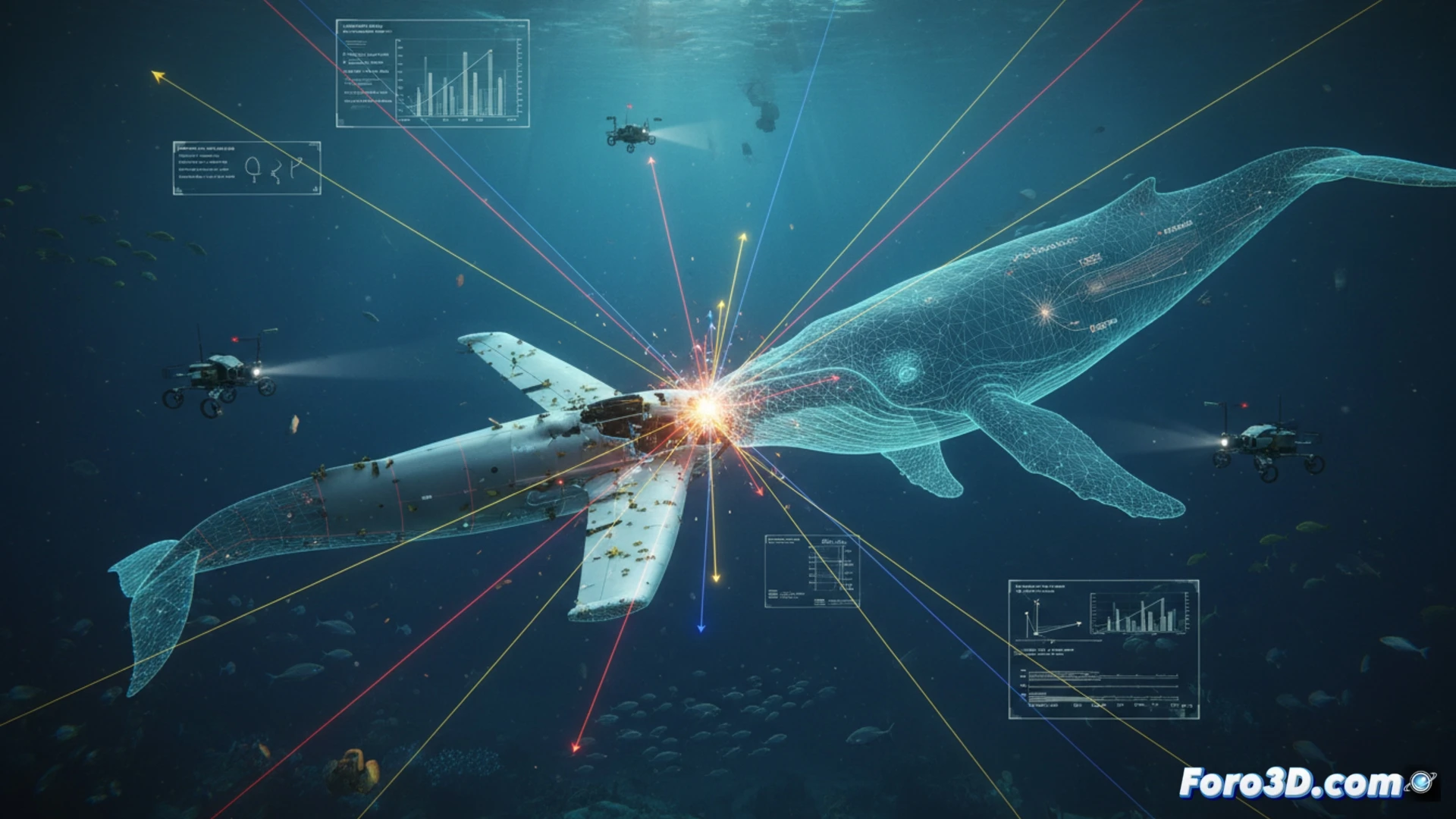
調査用グライダー型潜水機が保護区域内で鯨類と衝突した。この事故が観察規制に違反したかどうかを判断するため、研究者らはドローン船体のフォトグラメトリとクジラの3D解剖モデルを利用した。MATLABでシミュレーションされた軌道と速度の組み合わせ分析により、自律型車両が海洋調査ミッション中に法定安全距離を遵守していたかどうかを検証することが可能となった。
Agisoft Metashape と Blender による法医学的再現 🐋
プロセスは、損傷したグライダー船体の画像撮影から始まり、Agisoft Metashape で処理され、高解像度の点群と3Dモデルが生成された。並行して、Materialise Mimics でセグメント化されたCTスキャンデータを用いて、Blender で鯨類の解剖モデルが開発された。これら2つのモデルは仮想環境に統合され、衝突の力学がシミュレーションされた。速度と接近角度のパラメータは MATLAB にエクスポートされ、ドローンの軌道が海洋生物への接近に関する法的制限を遵守していたかどうかを計算するために使用された。最終的な指標は、グライダーの速度が排他的ゾーンの許容閾値を超えており、規制違反に相当することを示した。
自律型海洋機の規制への影響 ⚖️
この事例は、3D科学可視化が海洋保全のための監査ツールとなることを示している。フォトグラメトリ、解剖モデリング、物理シミュレーションの組み合わせは、事故の解明だけでなく、保護生息地における自律型車両のためのより精密な規制を設計するための技術的先例を確立する。衝突をデジタル的に再現する能力により、環境管理者はリスクを評価し、航行プロトコルを調整し、海洋調査を妨げることなく感受性の高い種を保護することができる。
グライダー機体と衝突箇所の高解像度水中フォトグラメトリは、保護環境において、鯨類との衝突痕と他の機械的・生物学的要因による損傷を区別できるだろうか?
(追記: Foro3D では、エイでさえ私たちのポリゴンよりも優れた社会的絆を持っていることを知っています) 🐠