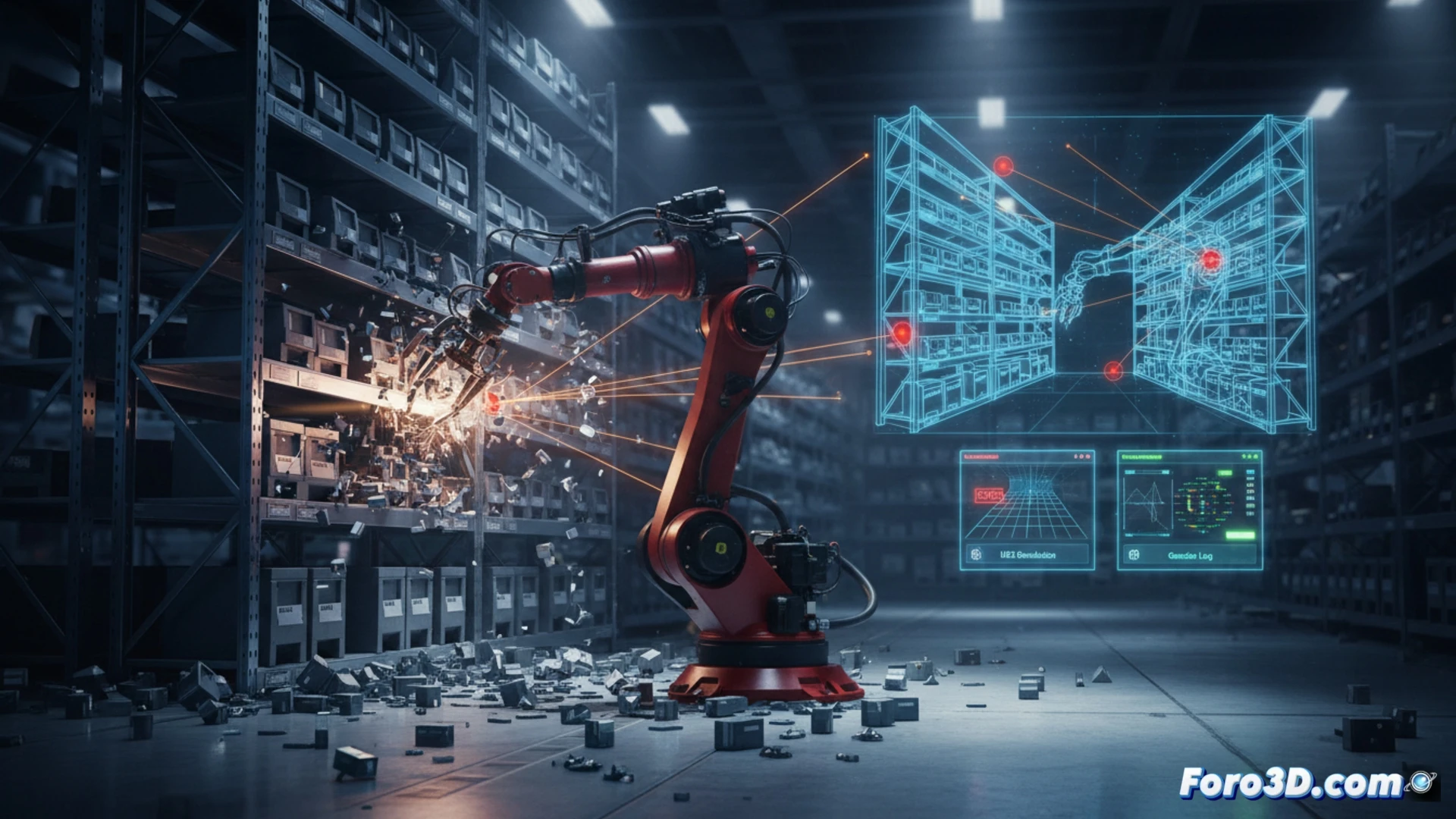
高密度倉庫でピッキングロボットが棚に衝突し、ドミノ倒し効果を引き起こして複数列の荷物を倒しました。この事故は、LIDARセンサーが障害物の接近を正しく検出していれば防げた可能性があります。故障の原因を理解するため、デジタルツインを用いて事故を再現し、FARO Sceneでスキャンした実際のデータと、Gazeboでのシミュレーション、Unreal Engine 5での可視化を比較しました。目的は、通路の金属表面で発生した鏡面反射によって生じた死角を特定することでした。
FARO Sceneによるフォレンジック再構築とGazeboでの検証 🛠️
最初のステップは、FARO Sceneを使用して事故後の倉庫の形状を捉え、高精度の点群データを生成することでした。この点群をNavisworksにインポートし、構造崩壊の連鎖を分析しました。その後、Gazeboでロボットと棚のデジタルツインを構築し、元のピッキング軌道を再現しました。この仮想環境でLIDARの走査経路をシミュレートしたところ、レーザービームが研磨された鋼板パネルに浅い角度で入射し、センサーがそれを空きスペースと誤解釈する反射を生み出す領域が特定されました。実際の点群とシミュレーションを直接比較した結果、これらの死角が衝突地点と正確に一致することが確認されました。
安全性の再考:物理的なレイアウトから没入型シミュレーションへ 🚧
この事故は、仮想環境で検証せずにLIDARセンサーのみに依存することの危険性を示しています。金属による鏡面反射は、高密度倉庫における重大な死角です。改善策として、棚の角に拡散マークを追加し、LIDARの支持部を再配置して問題となる角度をカバーするようにレイアウトを再設計することが提案されます。Unreal Engine 5を使用すると、これらの変更をリアルタイムで可視化でき、安全エンジニアは物理的に実装する前に構成をテストするための没入型ツールを手に入れることができ、新たなドミノ倒し効果のリスクを低減できます。
Unreal Engine 5のデジタルツインにおいて、ピッキングロボットの衝突を予測できなかったパラメータは何か、また高密度倉庫でのドミノ倒し効果をどのように防ぐことができたのか?
(追記:Foro3Dでは、ルート最適化もポリゴン最適化も、コンピューターが「もう無理」と言うまでやります)