2024年に観測されたオオメガラスイカ(Teuthowenia sp.)は、深海生物への関心を再び高めました。その半透明の体、巨大な目、そして触腕を外套膜内に引き込む独特の能力は、科学的な可視化において魅力的な技術的課題を提示します。本稿では、研究と教育を目的とし、模擬海洋環境で使用するための解剖学的に正確な3Dモデルの作成プロセスを詳述します。🦑
デジタル解剖学と触腕引き込み機構 🔬
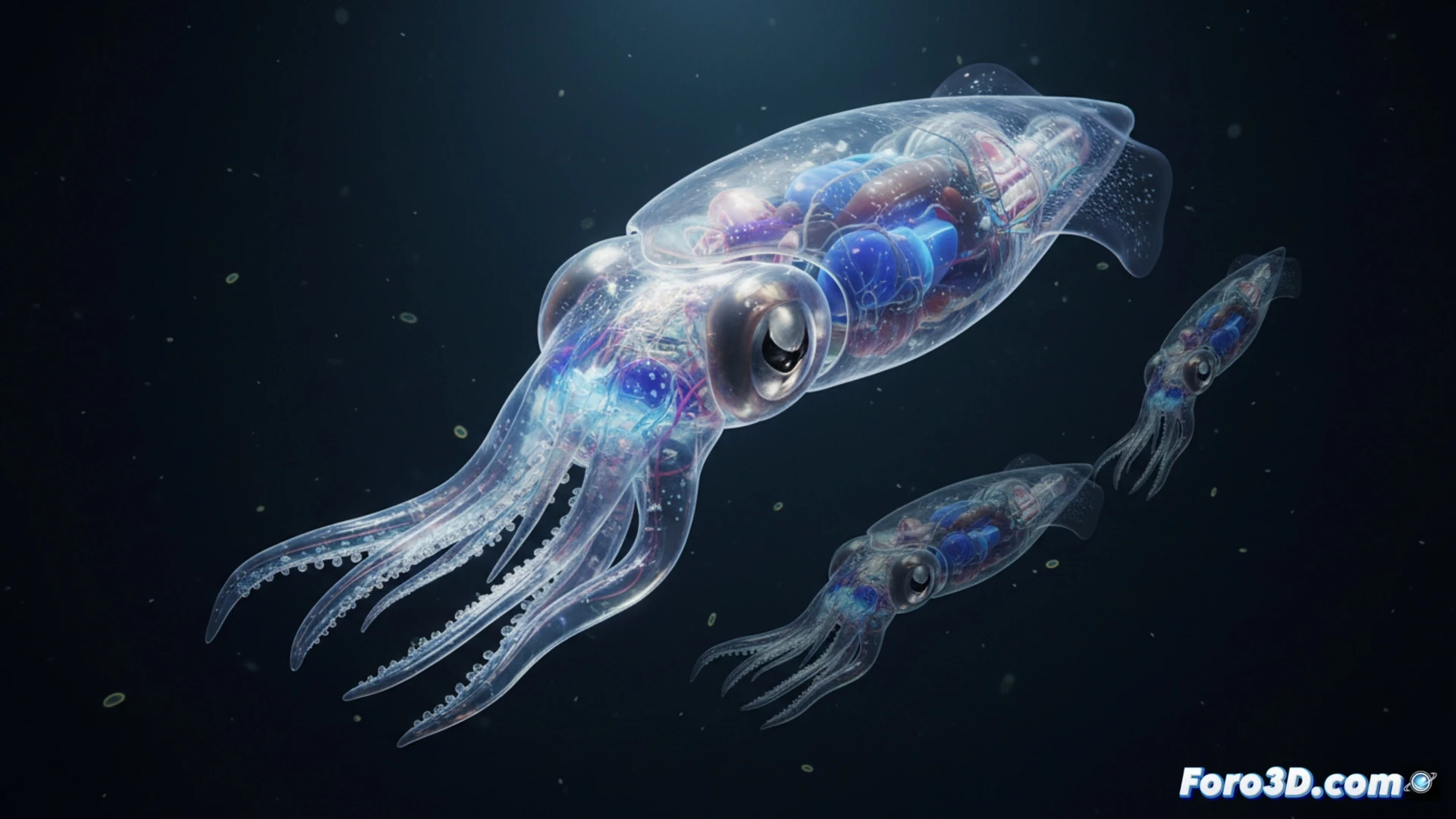
モデリングは、透明度、眼球の比率、外套膜の運動学という3つの基本軸に焦点を当てました。透明度を表現するために、組織のゼラチン質を模倣し、内部の消化腺や発光器を明らかにする表面下散乱(SSS)シェーダーを使用しました。体長比1:3の巨大な目には、高屈折率の球面レンズが必要でした。触腕の引き込み機構のアニメーションには、ソフトインフルエンスのコントロールボーンを用いたリギングが採用され、触腕が2秒のサイクルで折り畳まれ外套腔内に消失する動きを実現しました。Teuthoweniaと一般的なヤリイカ(Loligo vulgaris)の外套膜容積を比較する表も含まれており、流体力学への適応を強調しています。
中深層における進化的背景 🌊
形状を超えて、このモデルの価値は極限的な進化適応を説明する能力にあります。透明度は水深2000メートルでの生物発光する捕食者に対するカモフラージュであり、肥大した目は暗闇での光子捕捉を最大化します。触腕の引き込みは防御というよりも、ステルス戦略です。腕を隠すことで、イカはシルエットを小さくし、光の反射を防ぎます。3Dモデルには、光圧の勾配を持つ生息地シーンが含まれており、この生物がリアルタイムで海底に溶け込む様子を視覚化できます。
ガラスイカの極度の透明度と内部構造を、解剖学的な複雑さを隠す不透明なテクスチャに頼らずに、科学的に正確な3Dモデルに変換するにはどうすればよいでしょうか。
(追記: Foro3Dでは、マンタでさえも私たちのポリゴンよりも優れた社会的絆を持っていることを私たちは知っています)