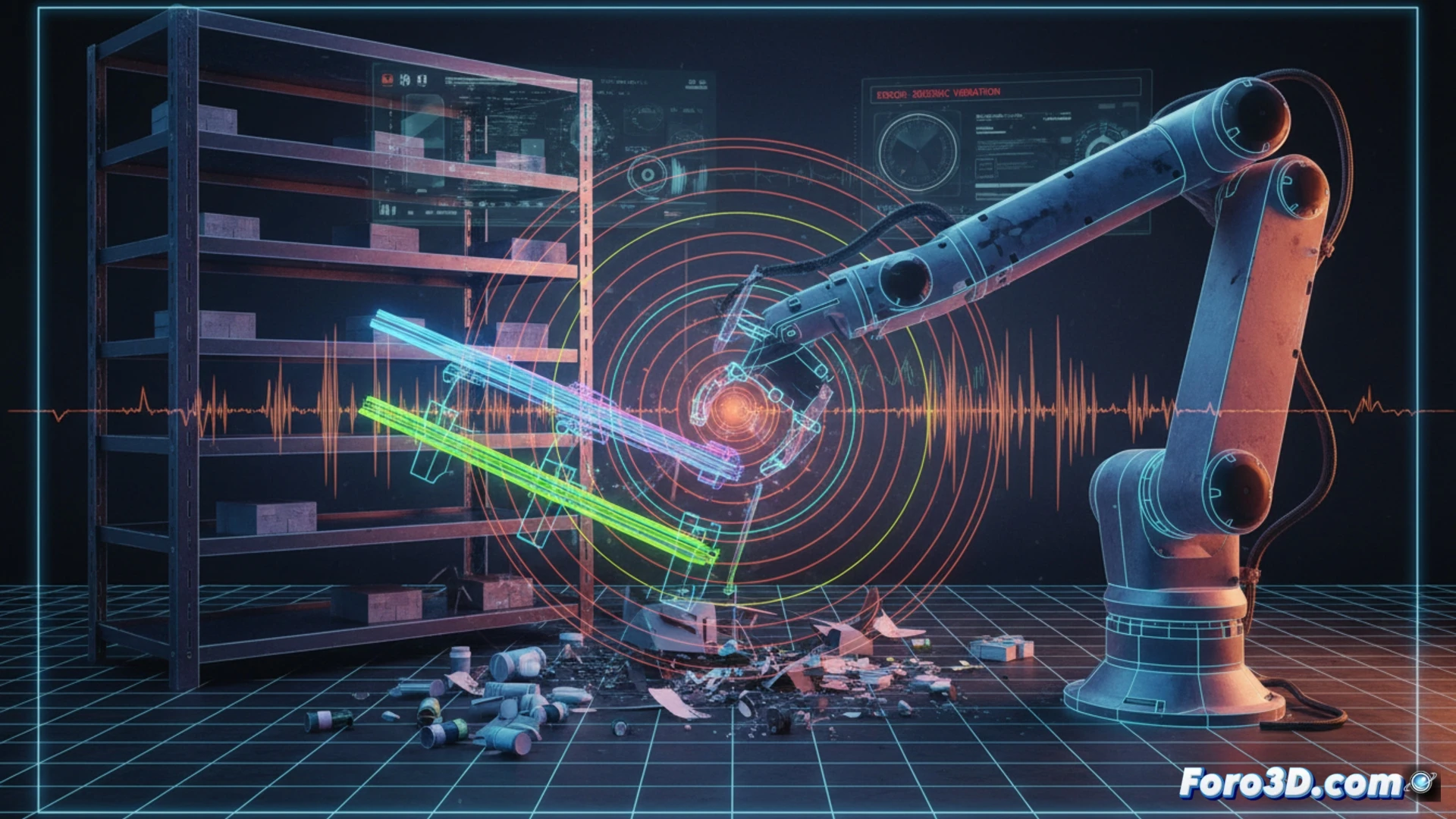
事件は高速ロボット薬局で発生した。ロボットアームが垂直収納システムの棚に激しく衝突したのだ。一見するとプログラミングエラーのように見えたが、保守チームは外部要因を疑った。3D解析により、ガイドレールにミリ単位の変形が発見された。これは建物の標準センサーでは記録されていない地震振動が原因だった。
RoboGuide、RealWorks、CloudCompareによる点検方法 🤖
診断はRoboGuideから始まり、アームの元の軌道がシミュレートされた。PLCのテレメトリデータと比較した結果、Z軸に2.3mmのずれが検出された。原因を確認するため、Trimbleレーザースキャナーでレールをスキャンし、点群データをTrimble RealWorksで処理した。表面の位置合わせにより、左側のレールに膨らみがあることが示された。CloudCompareを使用して、現在の状態と元のCAD設計との間で距離比較(M3C2)が行われ、衝突ゾーンで最大1.8mmの変形が計算された。Blenderは、地震振動の瞬間とエンドエフェクタの軌道を関連付けるフォレンジックアニメーションを生成するために使用された。
自動化システムのキャリブレーションへの教訓 ⚙️
このケースは、薬局のロボットシステムには、ロボット内部のセンサーを超えた構造監視が必要であることを示している。低振幅の地震振動は、建物に損傷を与えなくても、精密レールのキャリブレーションを狂わせる可能性がある。棚のベースに加速度計を統合し、CloudCompareを使用して定期的に3Dスキャンを実施し、衝突が発生する前にサブミリ単位の変形を検出することを推奨する。修正には、レールアンカーの再調整と、新しい誤差補正マップを使用したRoboGuideでのアームの再キャリブレーションが含まれた。
当初モデル化されていない地震振動に薬局ロボット環境で直面した場合、衝突の3D解析モデルは製薬用ロボットアームの軌道予測においてどの程度信頼できるか
(追記: ロボットのシミュレーションは楽しい。命令に従わなくなるまでは。)