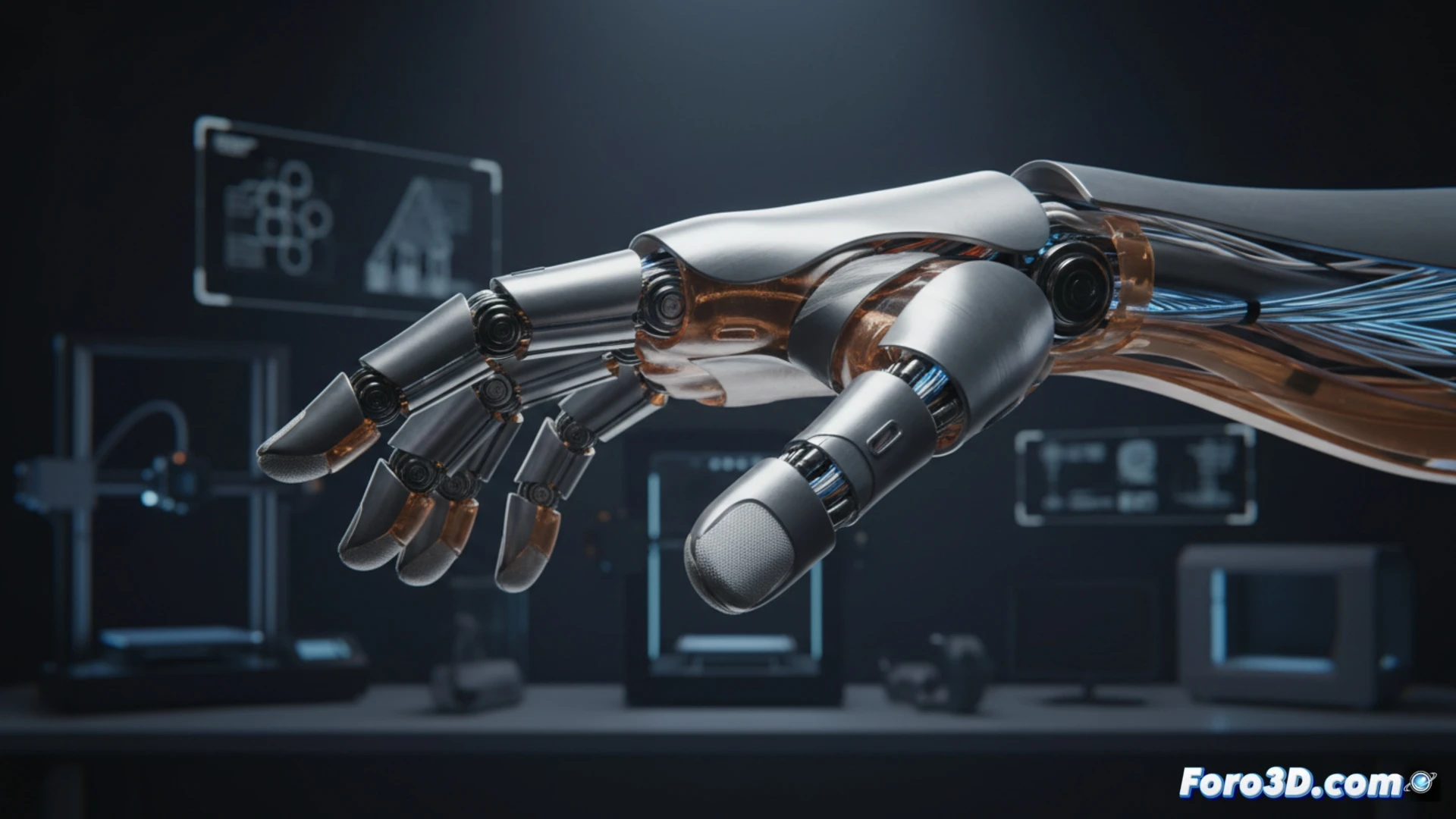
ETH Zurichの研究者たちは、3Dプリントを用いて製造された先進的なロボットハンドを発表し、ソフトロボティクスにおいて重要な一歩を踏み出しました。そのデザインは、剛性スケルトン、柔軟な関節、人工腱を組み合わせ、人間の解剖学的複雑さを模倣しています。このアプローチにより、より自然で適応性のある動きが可能になり、従来の剛性グリッパーの制限を超え、真に器用な物体操作を実現するロボットに近づいています。
剛性と柔軟性の統合:3Dモデリングの重要な役割 🤖
技術的な革新は、3Dプリントプロセス中に硬質材料と軟質材料を一体的に統合した点にあります。精密なデジタルモデリングは、内部剛性スケルトン、柔軟な関節、人工腱が収まるチャンネルを設計する上で極めて重要です。これらの腱は外部サーボモーターによって駆動され、筋肉系をシミュレートし、ハンドに優れた可動域と物体形状への適応能力を与えます。この付加製造により、伝統的な方法では実現不可能な複雑でバイオインスパイアードなデザインを迅速にプロトタイピングできます。
より器用で多用途なロボットの未来 🚀
この進歩は単なる学術的成果ではありません。この技術がもたらす器用さと滑らかな動きは、壊れやすい部品の取り扱いにおける産業オートメーション、安全に人と関わるアシストロボティクス、遠隔探査環境など、新たな可能性を開きます。3Dプリントは、自然に着想を得たロボットデザインをその有効性と優雅さを最終的に模倣するために、根本的なツールとして確立されます。
3Dプリントは、ソフトロボティクスにおけるバイオインスパイアードロボットハンドのデザインと機能をどのように革命化しているでしょうか? 🤔
(PD: ロボットをシミュレートするのは楽しいが、彼らが命令に従わなくなるときまでは。)