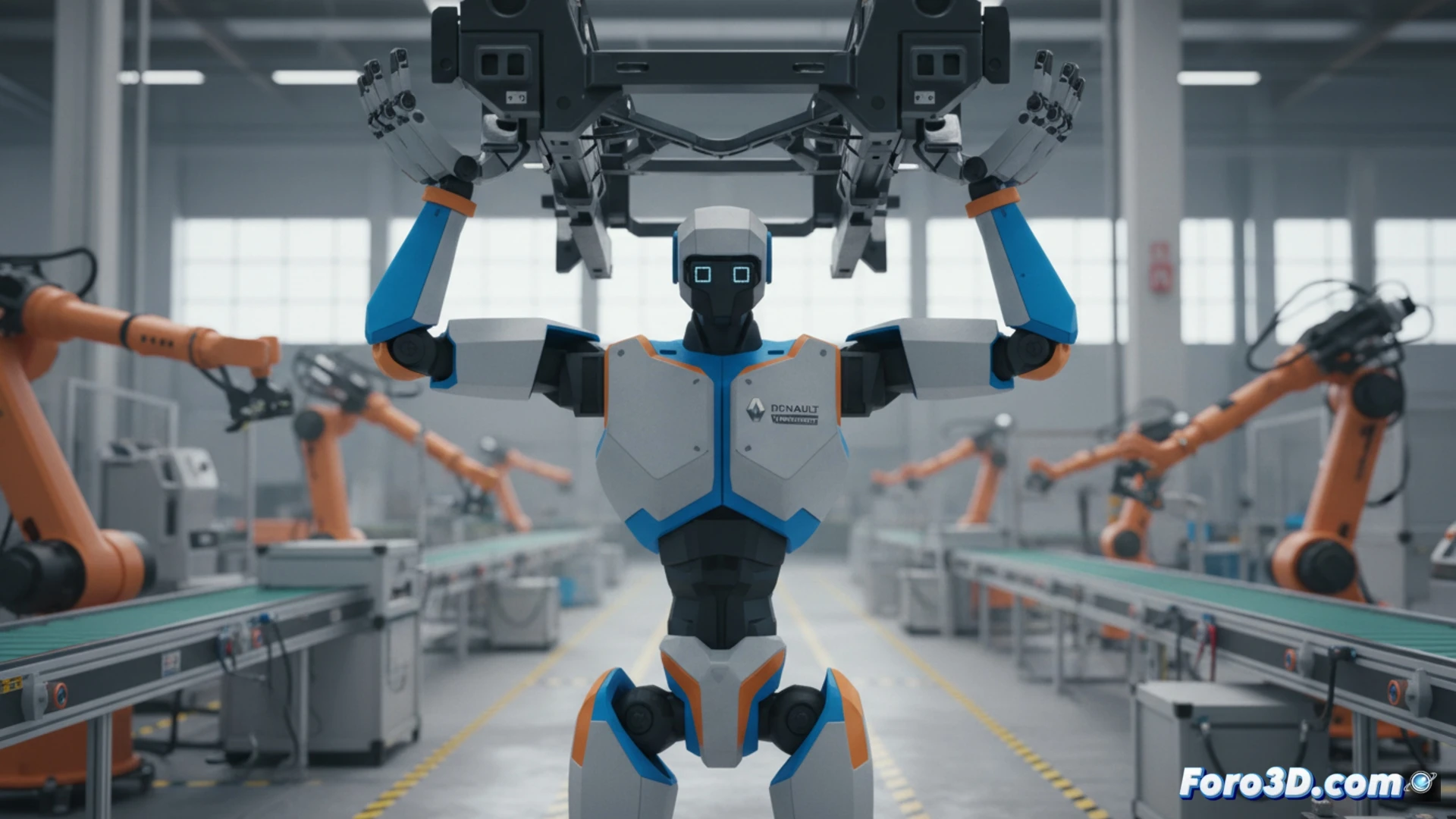
ルノーは、Wandercraftとの協力で、Calvin-40を発表しました。これは産業用ヒューマノイドロボットで、現実主義の傾向を打ち破るものです。Playmobilを思わせる簡素で幾何学的なデザインを持ち、このロボットはコスト効率と迅速な開発を優先します。その使命は、重い機器の運搬などの反復的で非エルゴノミックな作業を引き受けることで、生産を加速し、怪我を減らすことです。この賭けは、シンプルさとスケジュール最適化に基づく産業戦略を反映しています。
3Dモデリングとシミュレーション:迅速な開発と機能性の鍵 🤖
Calvin-40の開発がわずか40日で可能になったのは、先進的な3Dモデリングとシミュレーションツールなしにはありえません。その構造はWandercraftの外骨格技術に着想を得ており、審美性よりも機械的な機能性を優先した精密なデジタルデザインを必要とします。シミュレーションにより、その動作、重量負荷時のバランス、既存の製造環境への安全な統合が検証されます。また、重要なソフトウェア層である音声制御インターフェースも、物理的な実装前に仮想環境でモデリング・テストされ、人間オペレーターとの信頼できる相互作用を保証します。
幾何学的なシンプルさが産業自動化の利点 ⚙️
Calvin-40のアプローチは、ロボットシミュレーション分野に興味深い考察を投げかけます。簡素化されたジオメトリを持つ3Dモデルは制限ではなく、戦略的な利点です。シミュレーションの計算複雑さを減らし、試行錯誤のサイクルを加速し、デジタル開発と物理製造の両方を低コスト化します。この事例は、特定の産業環境では、効率的な3Dモデルに基づく最適化が人間模倣よりも価値が高く、手頃な自動化への代替ルートを示すことを証明しています。
低コストデザインと産業指向のCalvin-40は、物流タスクの自動化におけるヒューマノイドロボットの使用を民主化できるでしょうか?
(PD: ロボットをシミュレートするのは楽しいが、命令に従わなくなったら終わりだ。)