最近のロボットラックシステムの故障は、物流および産業エンジニアに警鐘を鳴らしています。この自動化構造が動作中に崩壊した事故は、サプライチェーンを停止させただけでなく、機械設計に潜む脆弱性を明らかにしました。根本原因を理解するために、私たちは3Dシミュレーションとデジタルツインを活用しました。これらのツールにより、イベントをミリ単位で再現し、各コンポーネントの応力分布を可視化することができます。
崩壊のモデリングと構造応力分析 🏗️
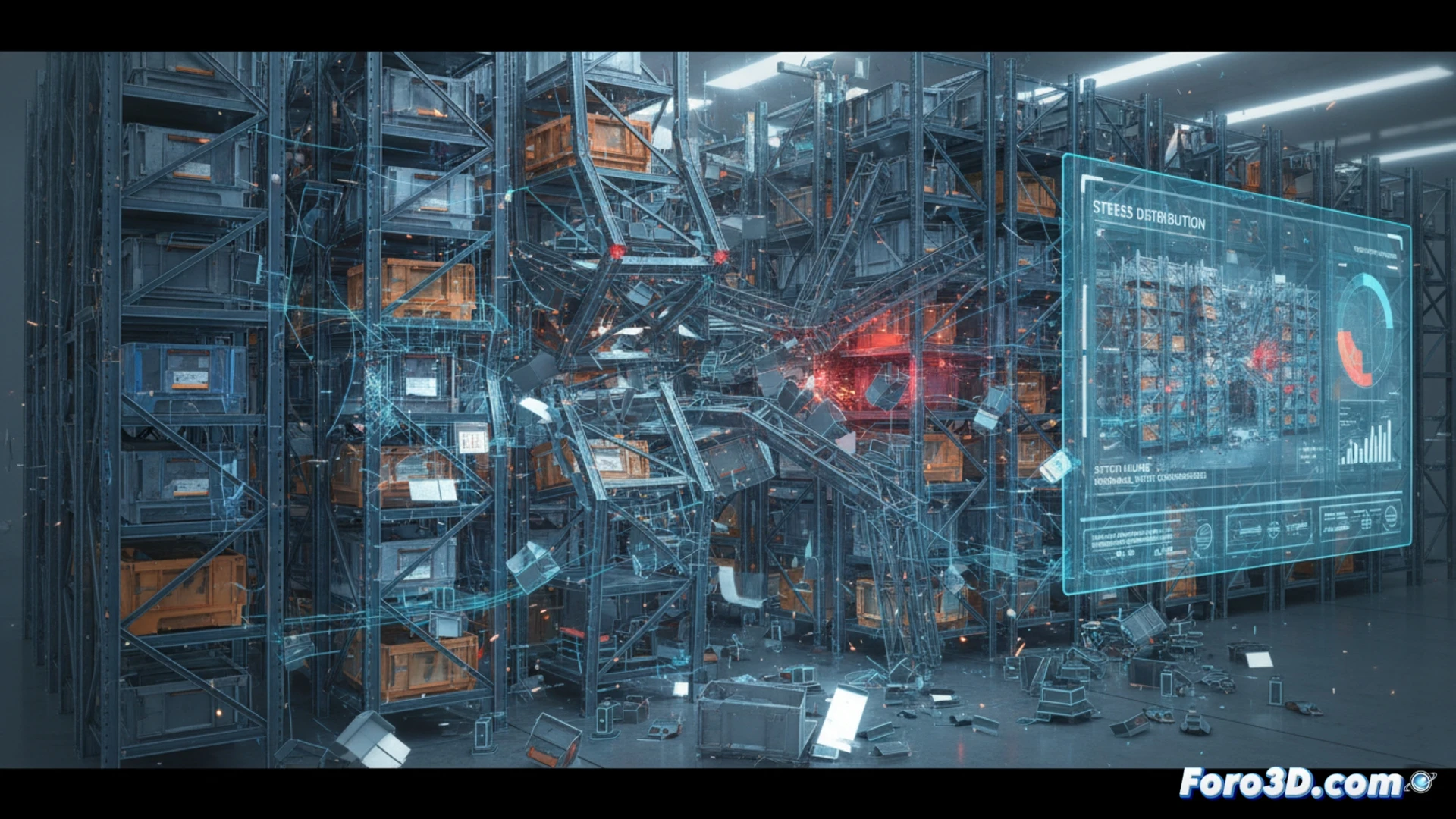
有限要素法(FEA)ソフトウェアとパラメトリックモデリングを用いて、レール、サポート、アンカーポイントを含むロボットラックの正確な形状を再構築しました。動的シミュレーションにより崩壊のシーケンスが再現されました。まずベース接合部での進行性変形、次に中央の縦桁での脆性破壊です。熱マップにより、最大応力が鋼の降伏限界を40%超え、ガイドレールと垂直プロファイルの接続点に集中していることが明らかになりました。これは、繰り返し荷重サイクルによって悪化した材料疲労が主な引き金であったことを示唆しています。
デジタルツインによる予知保全の教訓 🔧
このケースは、3Dシミュレーションが設計だけでなく、故障が発生する前に予測するためにも役立つことを示しています。IoTセンサーデータをデジタルツインに統合することで、各棚の変形をリアルタイムで監視し、荷重サイクルを調整できます。技術的な提案は明確です。仮想モデルで定期的な疲労シミュレーションを実施し、計算時間で10年の運用をエミュレートすることです。これにより、重要なポイントを特定し、予防的なメンテナンスを計画し、崩壊を回避し、ロボットシステムの寿命を最適化します。
産業用ロボットラックの崩壊を正確に予測するために、3Dシミュレーションに含めるべき重要な荷重と構造疲労のパラメータは何ですか?
(追記: Foro3Dでは、コンピューターが「もう無理」と言うまで、ルートを最適化するのと同じようにポリゴンを最適化します)