最近発生したロボット薬局の詰まり事故は、単なる技術的な逸話ではなく、産業物流にとって完璧なケーススタディです。本記事では、3D可視化によって、自動倉庫から最終的な調剤機に至るまでの医薬品フローにおける正確な閉塞ポイントを特定し、システム最適化のためのロードマップを提供する方法を分析します。
物流フローのマッピングと閉塞ポイント 🚧
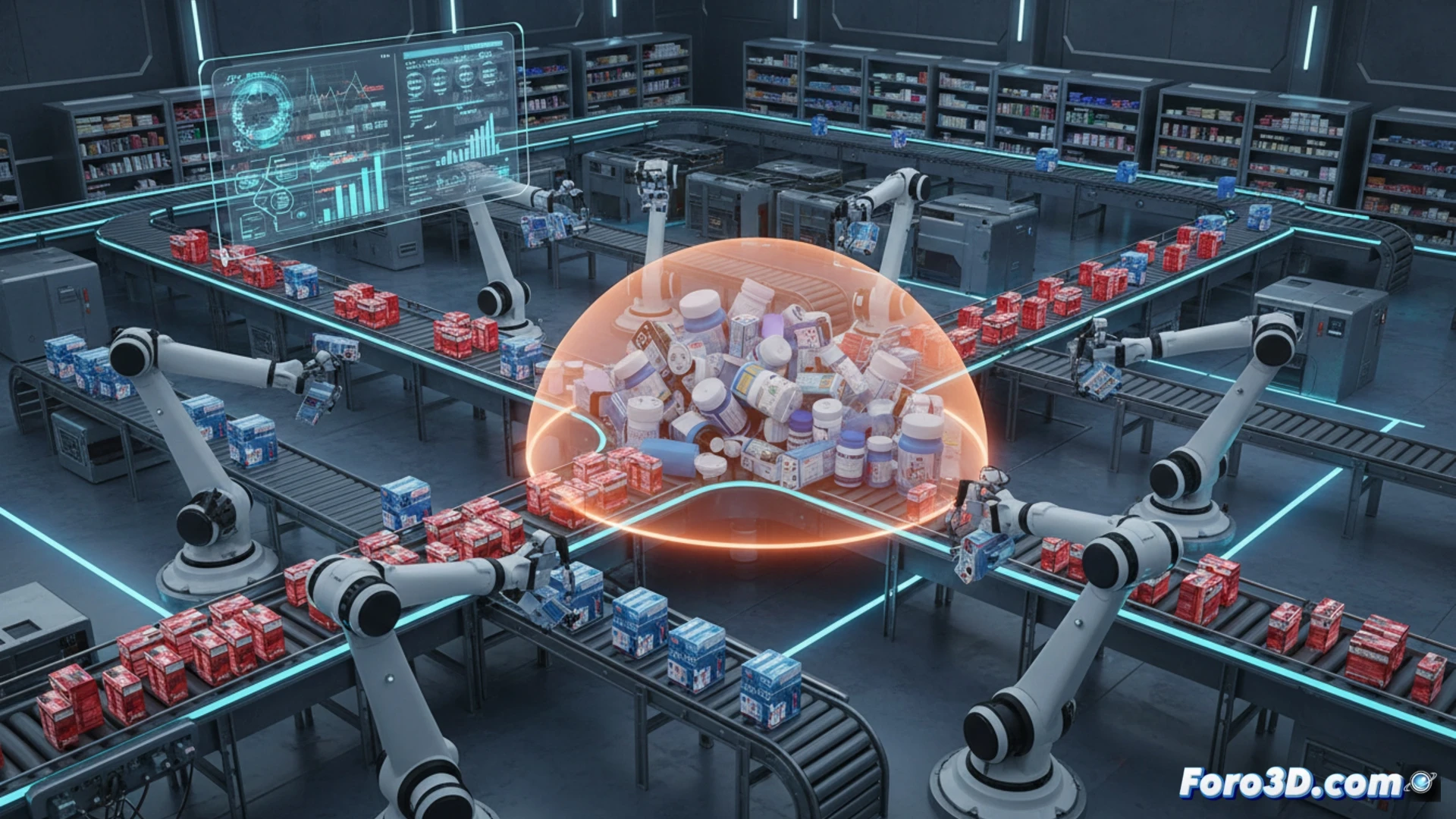
詰まりを理解するには、製品の経路を3Dでモデル化する必要があります。プロセスはロボット棚から始まり、そこで空気圧アームがブリスターパックを取り出します。これは可変速コンベヤーベルトに移り、仕分けホッパーへと導かれます。重要なポイントは通常、コンベヤーとホッパーの接合部にあり、パッケージの形状や粉塵の蓄積が過度の摩擦を引き起こします。個別要素法(DEM)によるシミュレーションを通じて、ユニットの蓄積を可視化し、フローが崩壊する正確なタイミングを予測できます。
停止を防ぐための予測的再設計 🔧
解決策は単にセンサーを清掃することではなく、ボトルネックを再設計することです。ホッパーの傾斜角度とコンベヤーベルト表面のテクスチャを3Dシミュレーションした結果、非粘着性コーティングを施した35度の角度で、詰まりが80パーセント減少することがわかりました。この薬局のデジタルツインに基づくアプローチにより、サプライチェーンで実際の中断が発生する前に、予知保全を実施し、ロボットアームのパラメータを調整することが可能になります。
ロボット薬局の詰まりの3Dシミュレーションは、高回転在庫の産業物流におけるボトルネックをどのように予測し、解決できるのでしょうか?
(追記: 産業プラントのシミュレーションは、まるでシムズをプレイしているようなものですが、プールからはしごを外すようなことはできません)