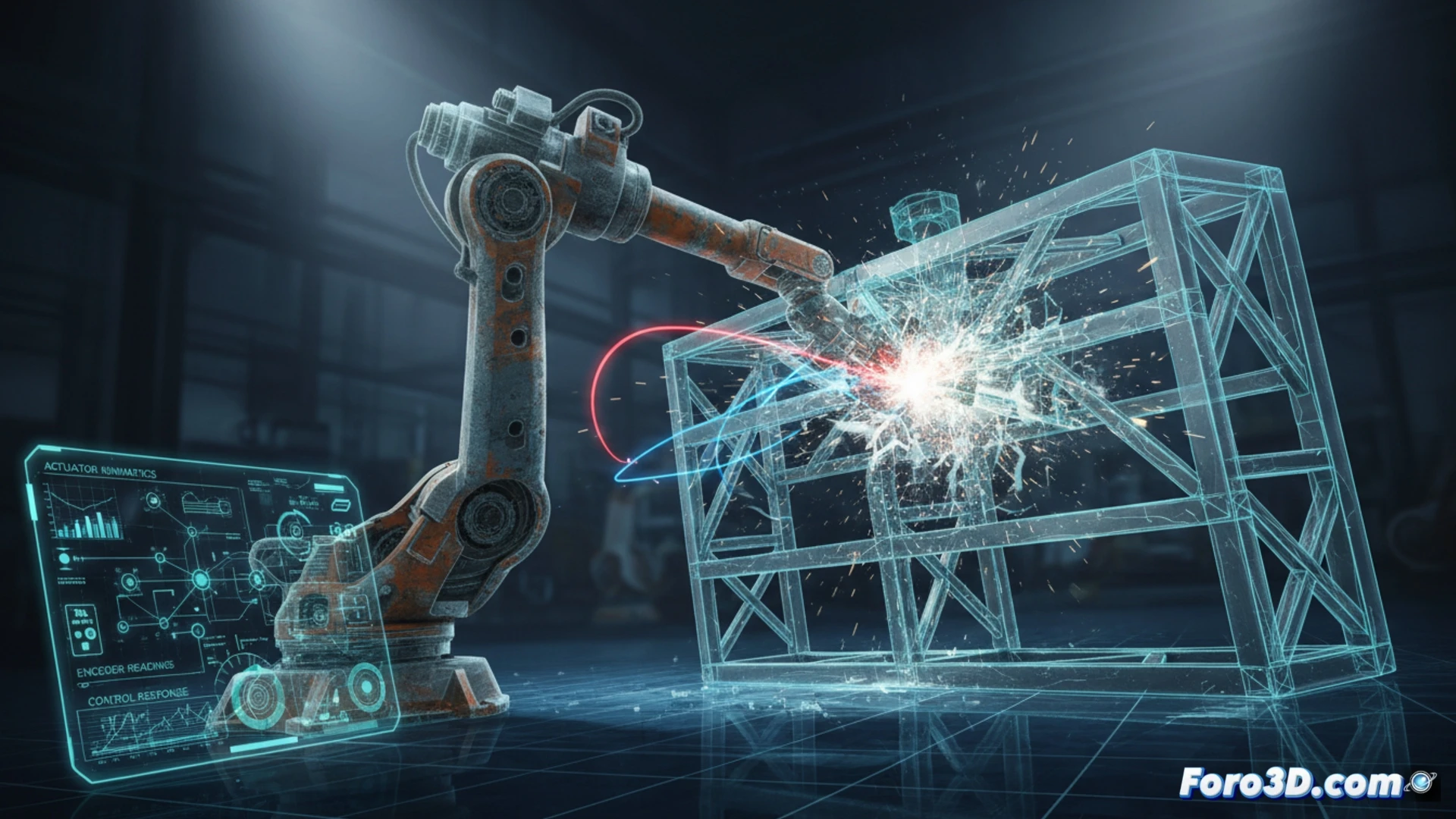
ペイントロボットエラーとして知られるこのインシデントは、産業安全の分野で技術的な議論を引き起こしています。自動車部品にコーティングを施すようプログラムされたロボットアームが、急激に軌道を逸脱し、金属構造物に衝突しました。この事例は、フォレンジックパイプラインの完璧な研究対象となり、現場の3D再構築により、アクチュエータの運動学、エンコーダの読み取り値、制御システムの応答などの変数を分離することが可能になります。
軌道シミュレーションと機械的故障解析 🔧
調査に取り組むため、LiDARスキャナで取得した点群データを用いて環境のデジタルモデルを生成します。衝突前の動作ログに基づくロボットアームの動的シミュレーションにより、手首の回転軸に異常が明らかになります。3Dフォレンジック分析により、角速度が安全しきい値を超えた正確な瞬間を特定でき、ハーモニックドライブの故障またはレゾルバ信号の破損を示唆しています。このアプローチは人的ミスを排除し、原因を機械部品の早期摩耗に集中させます。
自動化環境における予防のための教訓 🛡️
フォレンジックアニメーションによる事故の可視化は、破断点を特定するだけでなく、予知保全のための点検プロトコルを確立します。振動センサーの統合と逆運動学のリアルタイム監視により、同様の逸脱を予測することができます。この事例は、インシデントの3D文書化が安全工学にとって不可欠なツールであり、単一のエラーをロボット産業全体で再現可能な教訓に変えることを示しています。
産業用ペイントロボットのエラーの3D再構築において、軌道計画におけるアルゴリズム上の故障と、モデル化されていない物理的な逸脱を区別することを可能にするフォレンジックパイプラインの方法論は何ですか?
(追記:フォレンジックパイプラインでは、証拠と参照モデルを混同しないことが最も重要です... そうしないと、現場に幽霊が現れることになります。)