ロボティクスは自然の解剖学から学び進化する
現在の四足ロボットは驚くべき敏捷性を示していますが、その技術基盤は自然が完成させたシステムとは根本的に異なります。ロボット工学は、質的飛躍を遂げるために生体力学の原則を注意深く観察し始めています。🔬
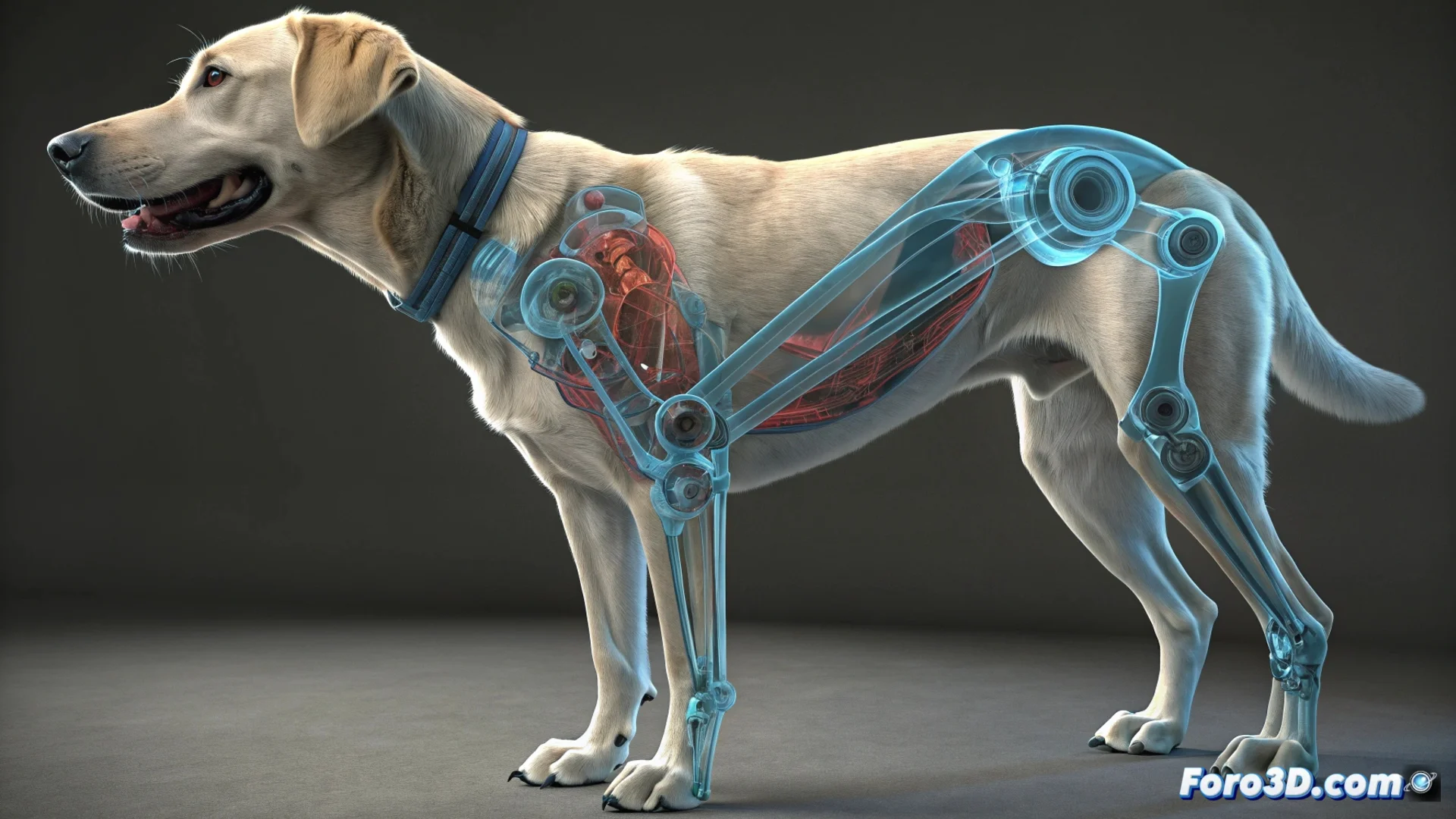
回転アクチュエータの支配
産業はほぼ完全に電動モーターに依存して運動を生成しています。これらのコンポーネントは高い精度を提供し、先進的なソフトウェアで比較的簡単に制御できます。ロボットプラットフォームはセンサーデータを処理し、軌道を計算し、複雑な表面上で動的安定性をリアルタイムで維持します。
電動モーターの主な利点:- コンパクトなパッケージで高い精度と出力。
- 制御電子システムとの簡単な統合。
- 複雑で協調的な動きを繰り返し実行する能力。
「時には、進歩するために工学は過去を振り返る必要があります。ロボット工学の運動の未来は、猫の動き方を再発見することにあるかもしれません。」
数百万年の進化の教訓
自然の解剖学はモーターを使わず、収縮する筋繊維のシステムを採用しています。このアプローチはエネルギーをより適応的に消費し、衝撃からの回復が優れています。筋肉と腱はアクチュエータ、緩衝材、スプリングとして同時に機能し、弾性エネルギーを高効率で蓄積・放出します。
生体力学を模倣する利点:- より軽量で自然に見える動きのロボット。
- 運用騒音の大幅削減。
- 弾性エネルギーを活用したバッテリー消費の低減。
より有能なロボットへの道
生体力学の原則をロボティクスに統合することは、電子機器を放棄することを意味するのではなく、それを補完することです。目標は、筋肉組織の汎用性と回復力を捉えたハイブリッドシステムや新しいアクチュエータの開発です。このバイオインスパイアードアプローチは、単に移動するだけでなく、環境と根本的に優れた効率的な方法で相互作用するマシンを約束します。🚀