ピノキオタイプのモデルにBipedを統合するための要件
3ds MaxのピノキオタイプのモデルにBipedを追加するには、riggingとアニメーションが正しく機能することを保証するために、モデルが特定の条件を満たすことが重要です。まず、体のパーツそれぞれが分離され、論理的に向き付けられ、肩、肘、膝、足首などの関節にピボットが適切に配置されている必要があります。これにより、Bipedがこれらのセグメントを制御し、自然に動かすことが容易になります。いいえ、解剖学の専門家である必要はありません!🧌
モデルの条件
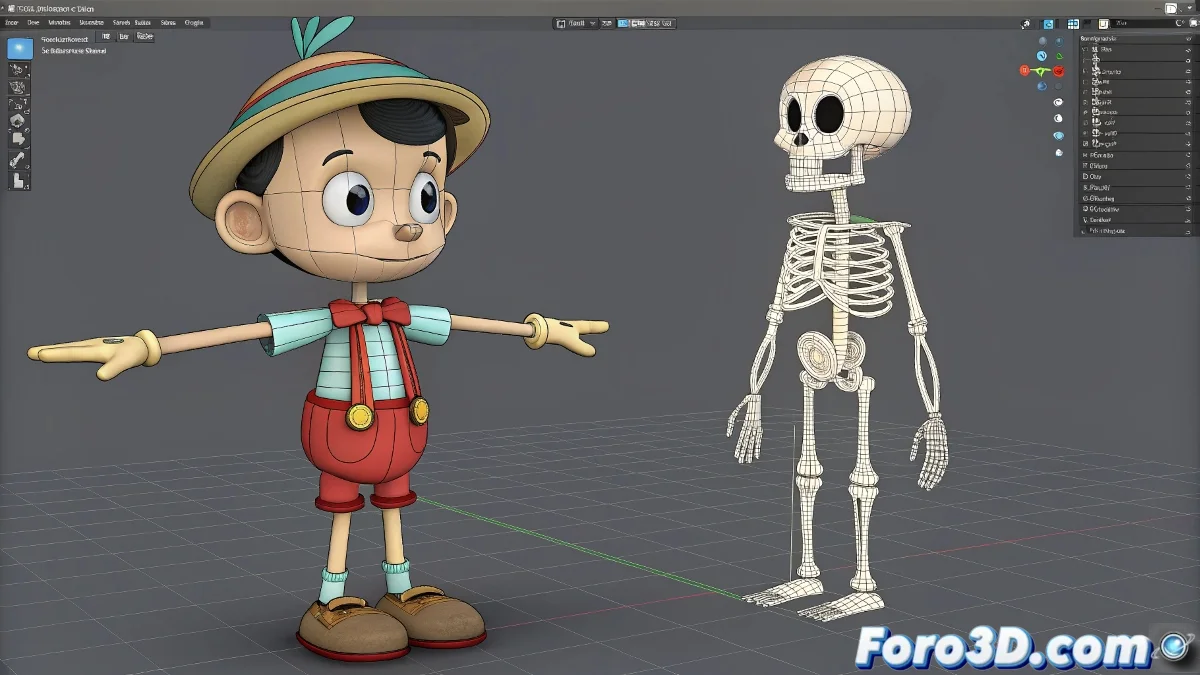
さらに、モデルはニュートラルなポーズにある必要があります。できれば立位で、腕を十字に広げたり下に伸ばしたりした状態で、Bipedがプロポーションと関節に問題なく一致できるようにします。モデルのパーツに明確な階層構造があるか、Bipedのスケルトンに簡単にリンクできることが基本です。
Bipedをモデルにリンクする
すべて準備ができたら、3ds MaxでSkinまたはPhysiqueツールを使用して、独立したパーツをBipedのスケルトンにリンクできます。これにより、モデルをより自由かつ精密にアニメーション化できます。これらの要件を満たさない場合、Bipedがモデルを適切に制御できず、アニメーションが奇妙に見えたり壊れたりする可能性があります。
要するに、ピノキオに独立したパーツが適切にピボットされ、適切なベースポーズとスキンに互換性のある構造があることを確認してください。そうすれば、Bipedで問題なくアニメーション化できます。安心してください、物語とは異なり、あなたのデジタルピノキオは動きごとに成長しません、いたずらなスケール修正子を追加しない限り!🌱
これらのヒントで、3ds MaxのピノキオタイプのモデルにBipedを効果的に統合できます。覚えておいてください、何か期待通りにいかなかったら、いつもピボットを責められます!😉