Kengoro:人間のように汗をかくヒューマノイドロボット
東京大学のJSK研究所では、エンジニアたちは単に機械を構築するだけでなく、生命を再現することを目指しています。彼らの最も先進的な創造物であるKengoroは、人間の複雑な骨格、筋肉、腱のシステムを精密にコピーするための取り組みです。この革新的なアプローチは、ロボットの設計と制御方法を再定義し、従来の硬直性を離れています。🤖
過熱を防ぐために汗をかく骨格
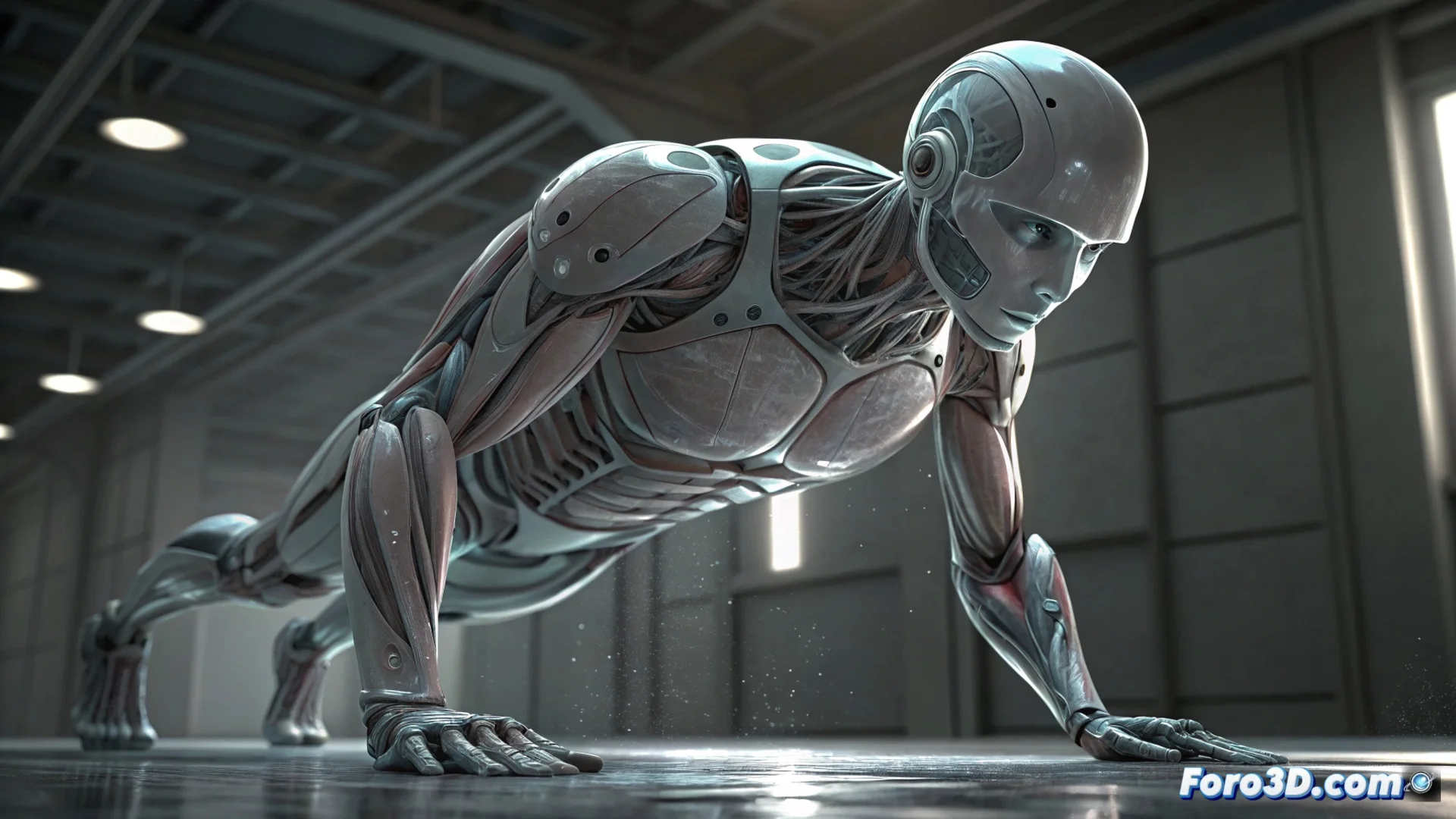
Kengoroの最大の技術的課題は、108個の独立したモーターによって発生する熱の管理でした。解決策はファンや大型のヒートシンクではなく、生物学的プロセスを模倣することでした。研究者たちは蒸発冷却システムを実装しました。多孔質のアルミニウム骨格フレームを通じて水が循環し、表面に浸透して蒸発し、体を冷やす汗と同じように効率的に熱を抽出します。
「汗」冷却の主な利点:- ロボットが腕立て伏せなどの重い負荷下でも長時間連続して動作できるようにします。
- 動きやデザインを制限する大型の冷却部品の必要性を排除します。
- 構造全体に均一に冷却を分散し、重要なアクチュエータを保護します。
この冷却方法はパラダイムシフトです。重量を追加せず、構造自体を熱システムとして使用します。
柔軟な脊椎による有機的な動き
生物模倣解剖学を優先することで、Kengoroは卓越した運動能力を得ています。柔軟な脊椎は、硬い胴体を持つロボットでは達成できないバランス、衝撃吸収、ダイナミックな動作を実行するために不可欠です。この汎用性は、人間の動きを研究するための新たなフロンティアを開きます。
このデザインの直接的な応用:- アシストロボティクスの分野を進展させ、より自然な動きの外骨格や義肢を作成します。
- 怪我の予防やアスリートの性能向上のための人間の生体力学の理解を深めます。
- 制御アルゴリズムとシミュレーションをテストするための現実的な物理プラットフォームを提供します。
未来:動きの模倣から感覚の再現へ
Kengoroは、見た目だけでなく機能する生き物のようなロボットへの飛躍を表しています。この模倣の次の論理的ステップは、ロボットが環境と内部状態をより豊かに感知できる感覚システムを統合することです。このプロジェクトは、真に有機的で適応的な方法で世界と相互作用する機械の基盤を築きます。🔬