ジョイントをインテリジェントなジオメトリで接続するアート
Mayaで2つのジョイント間の自動指向シリンダーを作成するのは、そのアンカーポイントに動的に適応するデジタルブリッジを構築するようなものです🌉。このテクニックは、機械システム、ロボットアームの肢体、またはジオメトリが2つの移動ポイントを正しい向きと比率を維持して接続する必要があるあらゆる状況で非常に価値があります。
準備:ローカル軸の重要性
このテクニックの成功は、シリンダーのローカル軸の正しいアライメントに決定的に依存します。誤った向きの軸は、コンストレイントをどのように設定しても erraticな回転を引き起こします。
- 初期アライメント:シリンダーを通常Y軸に沿って向ける
- Freeze transformations:コンストレイントを適用する前にトランスフォームをリセット
- 視覚検証:display →transforms →local rotation axesを使用
- 中央ピボット:ピボットがジオメトリ中心にあることを確認
正しくアライメントされたローカル軸は、キャリブレーションされたコンパスのようなものです:常に正しい方向を指します。
指向のためのaimコンストレイント設定
aimコンストレイントはシステムの心臓部で、シリンダーがデジタル誘導ミサイルのように目標ジョイントに向かって指向し続ける責任を負います。
- Aim vector:シリンダーの指向軸(通常Y)に従って設定
- Up vector:垂直指向を維持する軸を設定
- World up type:より高い安定性のために「object rotation」を使用
- Constraint weights:スムーズなブレンドのための影響を調整
補完テクニックによる第二端の制御
aimコンストレイントが一方の端を制御する一方で、もう一方の端は接続システムを完成させるための追加アプローチが必要です。
- Secondary aim constraint:反対端の微細制御用
- Point constraint:回転に影響を与えずに位置を固定
- Pole vector constraint:ツイストと中間指向の制御用
- Expression-based control: 複雑なカスタム動作用
長さ適応のためのストレッチシステム
ジョイント間で伸縮する必要があるシリンダーに対して、ストレッチデフォーマが機械的なリアリズムの重要な層を追加します。
- Stretch deformer nativo:伸縮専用のデフォーマ
- Expresiones de distancia: ジョイント位置に基づく数学的長さ計算
- Volume preservation: 圧縮時の体積維持
- Limitadores de escala: 望ましくない極端な伸縮を防止
一般的な実用的アプリケーション
このテクニックは、要素間の動的接続が必要なアニメーションとリギングの多数のシナリオで应用されます。
- Brazos robóticos:機械部品間の接続
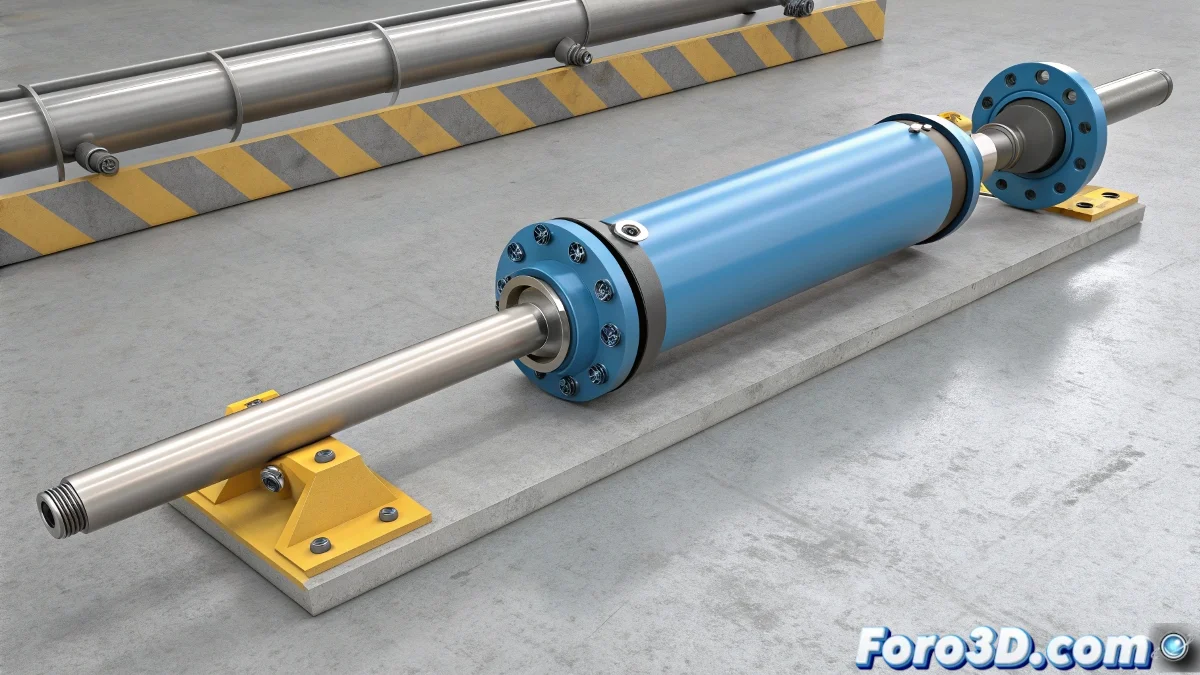
- Sistemas hidráulicos:リアルなピストンと油圧シリンダー
- Conexiones orgánicas:触手、付属肢、生物学的拡張
- Elementos de UI:アニメーションされたインターフェースの視覚接続
最適化とトラブルシューティング
あらゆる技術システムと同様に、デバッグと最適化が必要な問題が発生する可能性があります。
- Gimbal lock:クォータニオンまたはオイラー・フィルタを使用して回避
- Flip sudden:より高い安定性のためにup vectorオブジェクトを調整
- Performance:複雑なシステムのための効率的なコンストレイントを使用
- Render considerations: デフォーマが正しくレンダリングされることを確認
プロフェッショナルなワークフロー
このシステムを一貫して実装するには、予測可能な結果を保証する特定の方法論に従う必要があります。
そしてあなたのシリンダーがデジタル物理法則に挑戦する方向に指向することを決めたとき、常に新しい幾何学的次元を探検していると主張できます🌌。結局のところ、3Dの世界では、予期せぬ動作が革新的な機能に変わることがあります。